Magnetisches Zahnrad
Zahnräder und Getriebe werden verwendet, um die Geschwindigkeits- und Drehmomentübertragung in verschiedenen Anwendungen zu variieren. Sie werden hergestellt, um die Drehzahl/das Drehmoment einer Eingangsquelle mit der erforderlichen Drehzahl/dem erforderlichen Drehmoment einer Ausgangslast abzustimmen. Traditionell ist bekannt, dass die mechanischen Zahnräder weit verbreitet sind. Diese Systeme leiden jedoch unter einigen inhärenten Problemen wie Kontaktreibung, Wärme, Geräusch und Vibration usw. Die Zuverlässigkeit und Effizienz werden aufgrund dieser Probleme erheblich verringert.
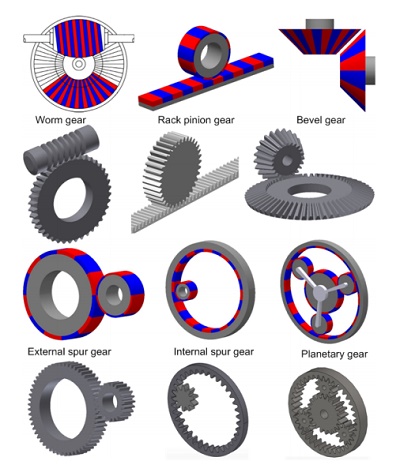
Um diese Probleme zu lösen, werden neue Arten von Zahnrädern entwickelt. Magnetgetriebe, die eine berührungslose Kraftübertragung erreichen, werden immer beliebter. Sie bieten ein reibungsloses Getriebe, das Schmier- und Wartungskosten einspart und Hitzeprobleme minimiert. Magnetgetriebe schützen von Natur aus vor Überlast, indem sie bei Anlegen eines Überlastdrehmoments harmlos durchrutschen und automatisch und sicher wieder einrücken, wenn das Fehlerdrehmoment beseitigt ist. Neben der Reduzierung von Geräuschen und Vibrationen tragen die oben genannten Vorteile dazu bei, ein hocheffizientes und sicheres Getriebesystem zu erhalten. Daher finden sich diese berührungslosen Kraftübertragungsvorrichtungen in den folgenden Anwendungen [1]: Überlastschutzanwendungen, die ein hohes Maß an Sicherheit erfordern (schnurlose Elektrowerkzeuge, Fabrikfördereinrichtungen usw.), Reinraumanwendungen, die keine Metallpulver erfordern (Wafer-Transfer) Roboter, Waferstepper und Halbleiter-Step-and-Scan-Systeme), Mobilitätsanwendungen mit hohem Wirkungsgrad (Übertragungssysteme für E-Bikes, Scooter usw.). Abhängig von ihren Rollen und Geometrien (koaxial, parallel axial, passiv, aktiv usw.) werden verschiedene Strukturen und Topologien von Magnetgetrieben untersucht und entwickelt. Abbildung 1 zeigt einige entsprechende Getriebetopologien zwischen mechanischen und magnetischen Getrieben [1].
Magnetgetriebe weisen jedoch einige Nachteile auf, wie z. B. große Abmessungen, Magnetfeldstörungen, teure Permanentmagnete, geringe Drehmomentdichte, konstantes Leistungsverhältnis usw. Daher arbeiten sowohl die Industrie als auch die Forscher daran, Magnetgetriebe zu verbessern und zu verbessern und diese Nachteile zu überwinden. Der Magnetfluss und das übertragene Drehmoment sind zwei wichtige Faktoren bei der Auslegung und Optimierung von Magnetgetrieben.
Die Finite-Elemente-Methode (FEM) hat eine hohe Zuverlässigkeit beim Entwurf und der Analyse technischer Systeme bewiesen [1]. Es kann verwendet werden, um jede komplizierte Geometrie zu simulieren und sowohl für lineare als auch für nichtlineare Probleme. Darüber hinaus kann die Finite-Elemente-Analyse (FEA) verwendet werden, um sowohl 3D- als auch 2D-approximierte Geometrie zu lösen. Durch die Verwendung von 2D-FEA werden zusätzliche Vorteile erzielt, z. B. Zeitersparnis, das Ausführen weiterer Iterationen usw. EMWorks2D, ein 2D-FEM-Plug-In in SOLIDWORKs, bietet eine genaue Lösung für magnetische und elektrische Probleme in Fällen, in denen das reale Problem auftreten kann angenähert als 2D-Problem.
In diesem Artikel wird EMWorks2D verwendet, um magnetische Ergebnisse (magnetische Flussdichte, Feldstärke, Drehmoment usw.) von zwei koaxialen Magnetgetriebemodellen zu berechnen. Die Drehmomentergebnisse werden mit den Referenzergebnissen verglichen.
2D-Simulation eines koaxialen Magnetgetriebes [2]
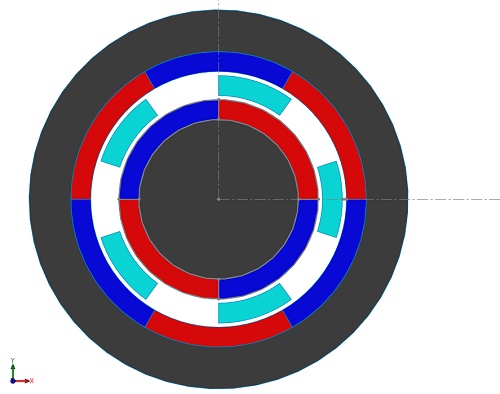
Ein koaxiales Magnetgetriebemodell ist in [2] dargestellt. Es besteht aus einem Innenrotor mit Pi=2 Polpaaren, einem Außenrotor mit Po=3 Polpaaren und Q=5 ferromagnetischen Polstücken. Der Innenrotor dreht sich mit höherer Geschwindigkeit als der Außenrotor. Somit ist der Innenrotor ein Hochgeschwindigkeitsrotor (HS) und der Außenrotor ist ein Niedriggeschwindigkeitsrotor (LS). Der LS-Rotor entwickelt ein höheres Drehmoment als der HS-Rotor. Der magnetische Fluss im Luftspaltbereich und das entwickelte Drehmoment werden mit EMWorks2D ausgewertet. Endeffekte werden bei dieser Analyse vernachlässigt. Die Permeabilität der Eisenkerne ist unendlich, während die Remanenz und die relative Rückstoßpermeabilität der Magnete 1,2 T bzw. 1,2 T betragen . Die Magnete weisen eine wechselnde radiale Magnetisierung auf.
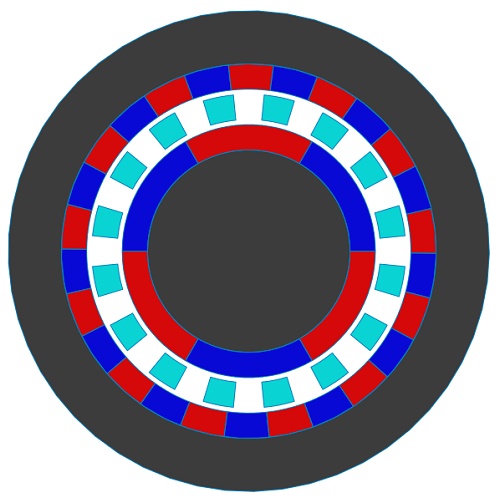
Das Modell ist in SOLIDWORKS eingebaut. In Tabelle 1 sind die Haupteigenschaften des Magnetgetriebemodells zusammengefasst. Abbildung 2 zeigt das mit SOLIDWORKS erstellte 2D-Modell.
| Artikel | Wert |
| Radius des Innenrotorjochs | 40,00 mm |
| Außenradius der Innenrotor-PMs | 50,00 mm |
| Innenradius der Schlitze | 52,00 mm |
| Außenradius der Schlitze | 62,00 Grad |
| Schlitzöffnung | 36,00 Grad |
| Innenradius der Außenrotor-PMs | 64,00 mm |
| Innenradius des äußeren Rotorjochs | 74,00 mm |
| Axiale Länge | 100,00 |
| Polpaar Innenrotor | 2 |
| Polpaare Außenrotor | 3 |
| Ferromagnetische Polstücke | 5 |
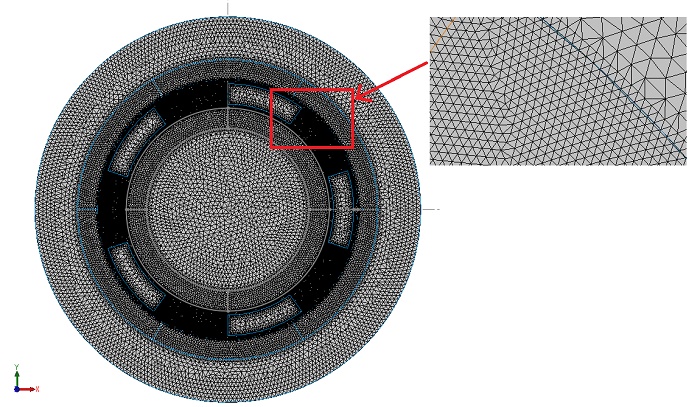
EMWorks2D ist mit einem automatischen und flexiblen Mesher ausgestattet, der Dreiecksnetzelemente generiert. Eine Maschenverfeinerung wird auf den Luftspaltbereich angewendet, um genaue Ergebnisse zu erhalten. Abbildung 3 zeigt das von EMWorks2D erstellte Netzdiagramm.
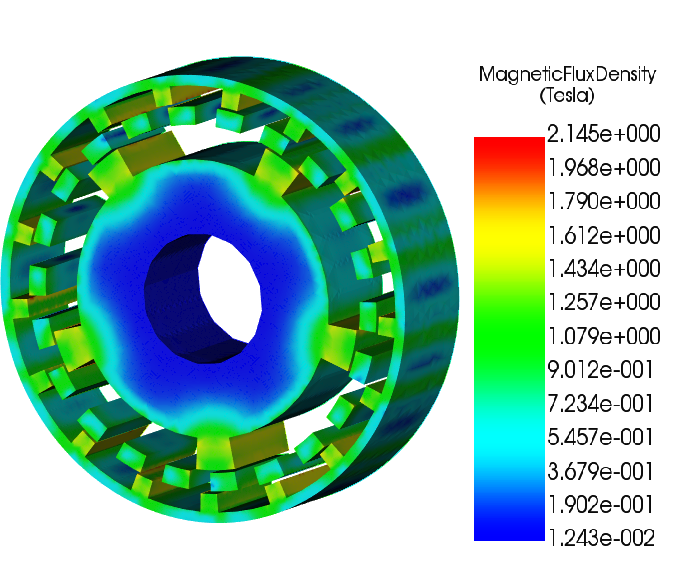
Zunächst werden der LS-Rotor und die ferromagnetischen Teile fixiert, während sich der HS-Rotor mit einem Winkel dreht im Bereich von 0 ° bis 90 °. Mit EMWorks2D wird eine parametrische Sweep-Analyse durchgeführt, um den magnetischen Fluss und die Drehmomentergebnisse gegenüber dem Innenrotorwinkel zu berechnen. Die Abbildungen 4a) und 4b) zeigen die magnetische Flussdichteverteilung innerhalb des Modells bei
und
. Die Diagramme enthalten Punkte mit hohem Fluss in den ferromagnetischen Körpern. 5 zeigt die magnetische Flussdichte im Luftspaltbereich unter dem Winkel
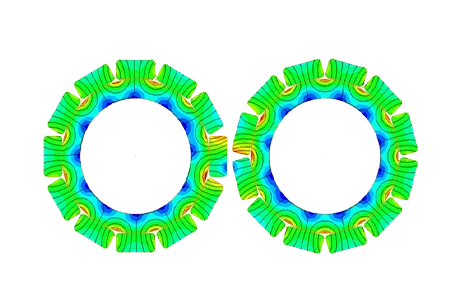
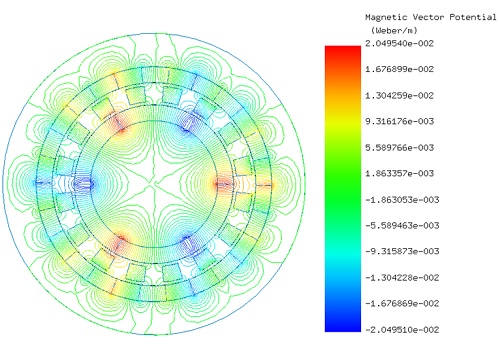
. Es zeigt eine inhomogene Verteilung aufgrund der Positionen der Pole des Innen- und Außenrotors. Die Potentiallinien des Magnetvektors sind in Abbildung 6 dargestellt. Die ferromagnetischen Teile tragen dazu bei, den Magnetfluss im Luftzwischenbereich zwischen den Polen des HS- und des LS-Rotors zu leiten. Praktisch zirkuliert die gesamte magnetische Flussdichte im Inneren der Magnetgetriebevorrichtung, wie in 6 zu sehen ist.
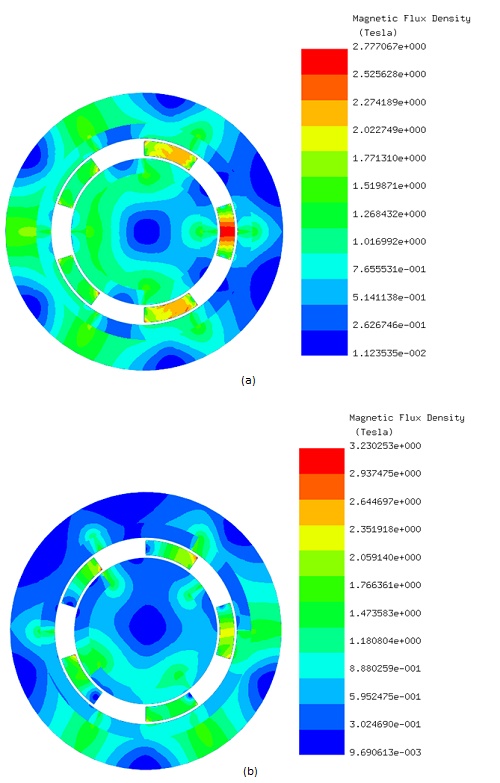
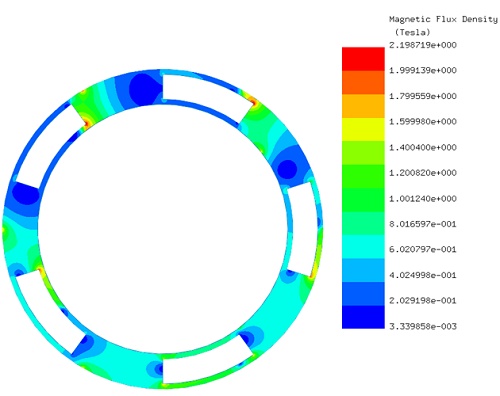
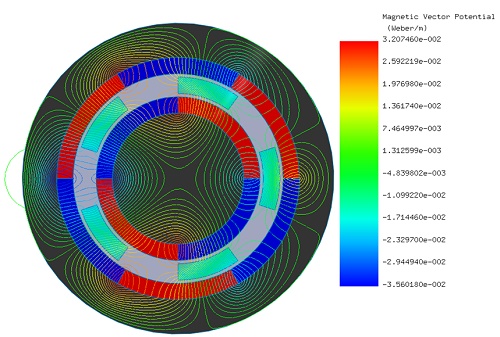
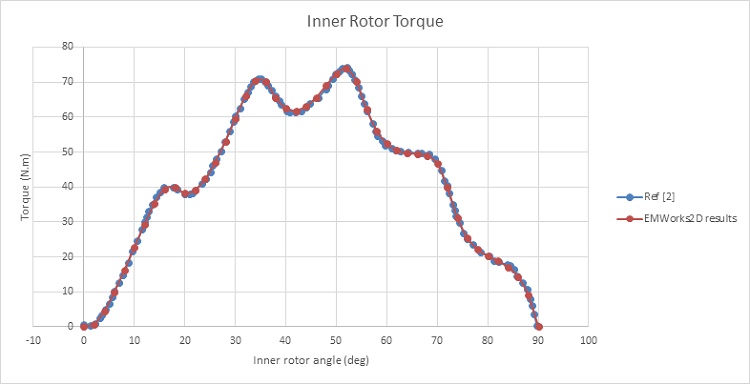
Fig. 7 zeigt das am HS-Rotor erzeugte magnetische Drehmoment, während der LS-Rotor und die ferromagnetischen Teile stationär gehalten werden. Das Drehmoment liegt bei nahezu Null Dann beginnt es mit dem Winkel zuzunehmen, bis ein erster Peak von 70 Nm bei
. Die Drehmomentkurve erreicht bei 74 Nm einen zweiten Spitzenwert
, das es abfällt bis es wieder null wird bei
.
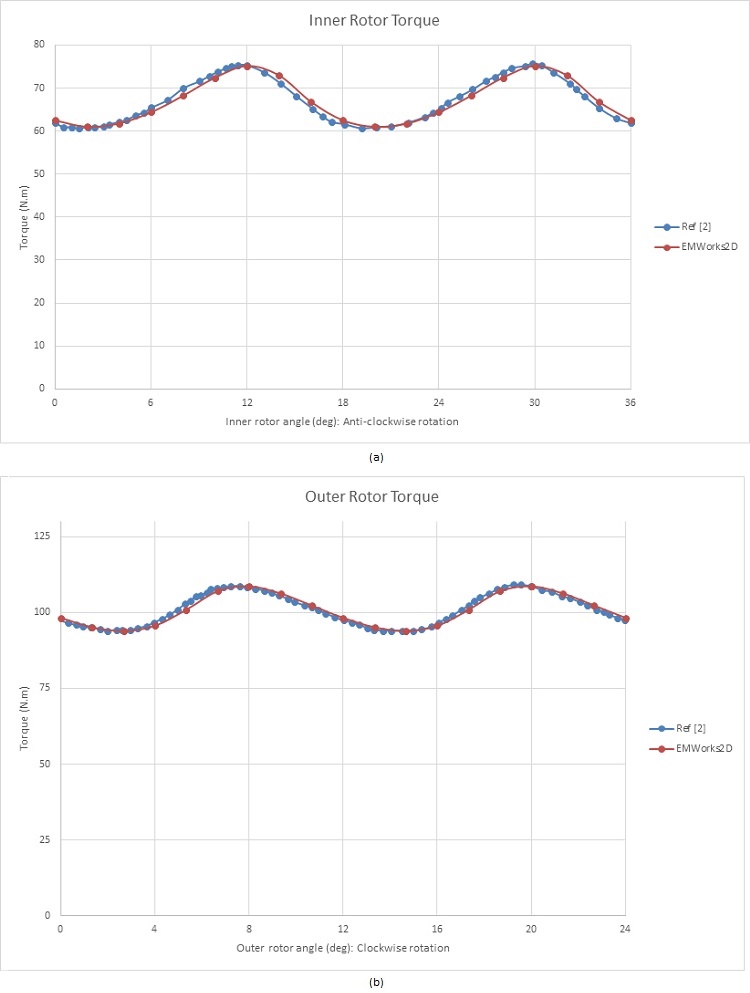
Nun werden die erzeugten Drehmomente ausgewertet, wenn sich Innen- und Außenrotor gegensinnig drehen (ferromagnetische Teile sind fixiert).
Äußerer Rotorwinkel wird mit folgender Gleichung beschrieben:
[2] Die Ausgangsposition des HS-Rotors ist
Das entspricht einem Drehmoment von 62 Nm, während es im LS-Rotor bei 98 Nm liegt. Die 8a) und 8b) repräsentieren die jeweils in den Innen- und Außenrotoren ausgeübten Drehmomente. Das im HS-Rotor erzeugte mittlere Drehmoment beträgt etwa 67 Nm, während es im LS-Rotor fast 101 Nm beträgt, was zu einem Übersetzungsverhältnis von etwa 3: 2 führt. Wird also der Innenrotor gedreht, so wird das Drehmoment durch dieses Magnetgetriebe 1,5-fach verstärkt.
Die obigen Drehmomentkurven sind durch hohe Welligkeiten gekennzeichnet. Um dieses Problem zu lösen, wird ein neues Modell mit höheren Polpaaren entwickelt und untersucht. Die neue magnetische Getriebestruktur [2] ist in Abbildung 9 dargestellt. Sie enthält Pi=3 Innenrotor-Polpaare, während der Außenrotor Po=13 Polpaare aufweist. Dies führt zu einer Übersetzung von 4,33. Die ferromagnetische Stückzahl beträgt Q=16.
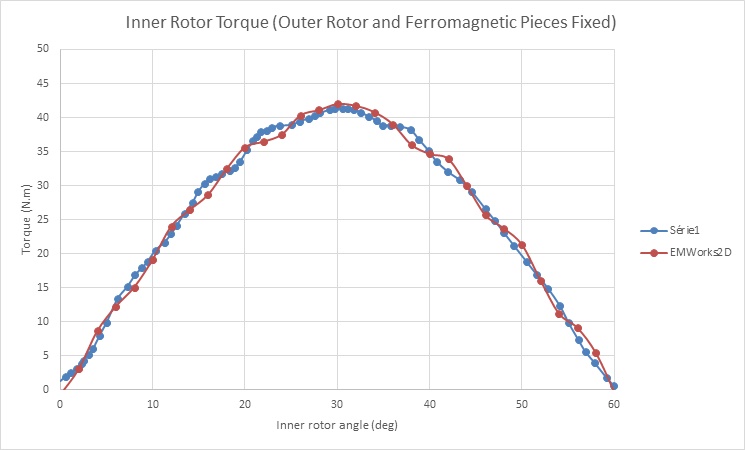
Die Flusslinien sind in 10 aufgetragen. Die ferromagnetischen Zwischenstücke leiten den Fluss im Luftspaltbereich. Wie im vorherigen Abschnitt wird die erste Drehmomentkurve berechnet, wenn sich der HS-Rotor dreht, während der LS-Rotor und die ferromagnetischen Teile festgehalten werden ( variiert von 0 ° bis 60 °). Das berechnete Drehmoment des HS-Rotors ist in Abbildung 11 dargestellt. Es hat einen Maximalwert um 41 Nm bei
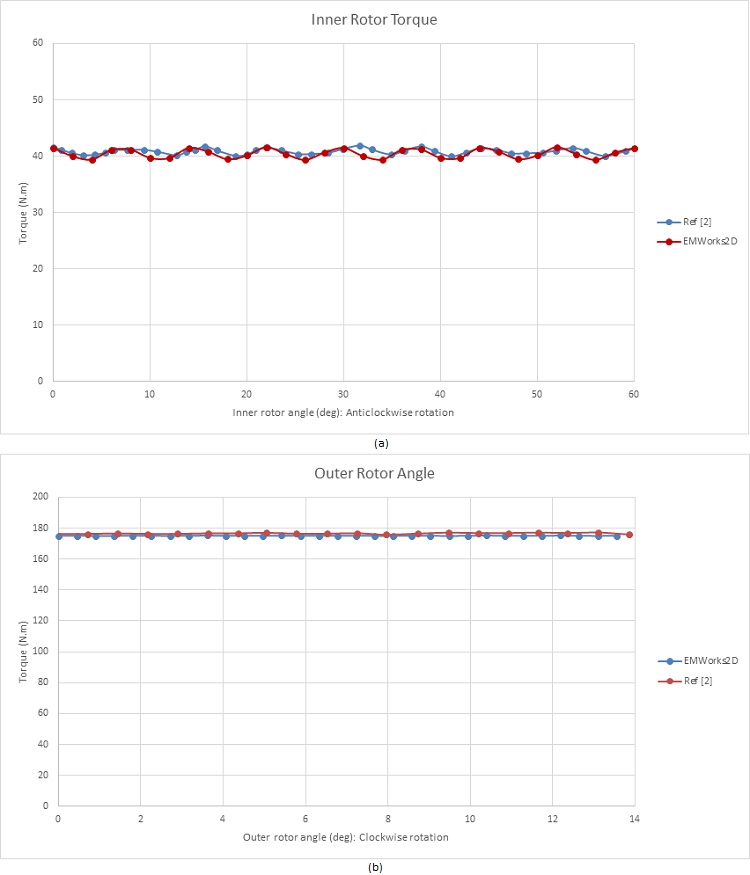
. In den Abbildungen 12a) und 12b) sind die Drehmomentkurven dargestellt, die im Innenrotor und im Außenrotor erzeugt werden, während sie sich in entgegengesetzter Richtung drehen. Der HS-Rotor entwickelt ein Drehmoment von 41 Nm, während das im LS-Rotor erzeugte Drehmoment etwa 175 Nm beträgt. Beide Drehmomente überprüfen somit das berechnete Übersetzungsverhältnis und zeichnen sich durch geringere Welligkeiten aus. Wie aus Fig. 12b) ersichtlich ist, sind die Welligkeiten praktisch beseitigt.
Fazit
Magnetgetriebesysteme haben aufgrund mehrerer Vorteile, die sie bieten, hohe Fähigkeiten bei der Kraftübertragung gezeigt. Somit ersetzten sie traditionelle mechanische Getriebe in vielen Anwendungen und Bereichen. Sie leiden jedoch immer noch unter einigen Problemen und Einschränkungen. Mithilfe von Computersimulationen werden neue Magnetgetriebe untersucht und entwickelt, die eine höhere Effizienz und Stabilität bieten. Die numerische Simulation hilft, den Entwicklungsprozess dieser Magnetgetriebe zu beschleunigen, indem Zeit und Geld gespart werden, indem das Prototyping reduziert wird und genaue Daten unter realen Bedingungen bereitgestellt werden. In diesem Artikel wurde EMWorks2D verwendet, um die magnetischen Ergebnisse (magnetischer Fluss und Drehmoment) vorherzusagen.
Verweise
[1]:P.M. Tlali, R-J. Wang, S. Gerber. Magnetic Gear Technologies: A Review. IEEE: 2014 International Conference on Electrical Machines (ICEM)[2]:Thierry Lubin, Smail Mezani, Abderrezak Rezzoug. Analytical Computation of the Magnetic Field Distribution in a Magnetic Gear.