序章
MEMS で一般的に使用される静電作動は、静電場と静電場が構造体に発生させる力に基づいています。
静電力によって引き起こされる電極の変形は、RFマイクロスイッチ、コムドライブ、圧力センサーなどの電気機械アクチュエーターにおける主な懸念事項です。
この技術は、軽量、コンパクトなサイズ、低消費電力および耐久性により、自動車やバイオ医療などの多くの業界で使用されています。
EMWorks[1]の解析ソフトウェアEMSを使用して、印加された 直流電圧下での膜のたわみを調べました。 このような目的を達成するために、構造と連成する静電解析タイプが使用されています。
実行された解析では、電気力が考慮され、重力加速度は無視されました。
モデルのジオメトリ
図 1 と図 2 は、解析されたモデルのジオメトリを示しています。それは 2 つの 40四角い膜でから成っています。1 つは底部に固定され、1 つは上部に可動で、2 つの蛇行したバネで制御されます。
z 軸に沿ってデバイスの厚さは 1に等しい。
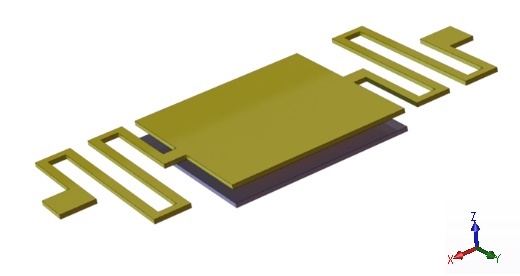
図 1 -解析されたモデルのジオメトリ
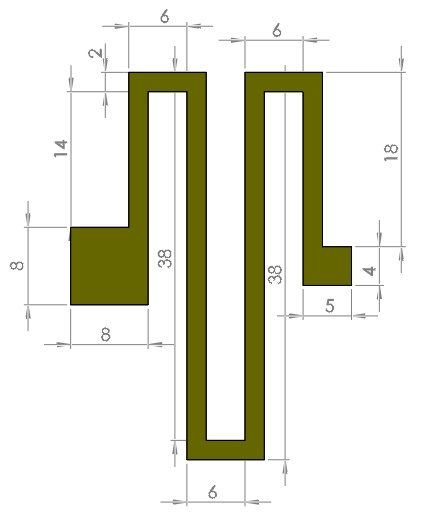
図 2 -サーペンタイン スプリングの形状
単位はすべてマイクロメートルです。
解析設定
EMSの静的電界モジュールは、構造解析と連成で、電気的結果と可動膜の機械的変形を計算および視覚化するために使用されています。
EMS を使用して解析を実行するには、次の重要な手順が実行されています。
- すべての固体に適切な材料を選択します。
- 必要な電磁入力を定義します。
- 構造境界条件を適用します。
- モデル全体をメッシュ化し、ソルバーを実行します。
材料特性
以下の表 1 は、解析に必要な材料特性をまとめたものです。
表 1 -モデルに割り当てられた材料の特性
| 材料名 | 比誘電率 | 密度 (kg/ | 弾性率 (Pa) | ポアソン比_ |
| 白金 | 1 | 2145 | 170e+09 | 0.26 |
| 空気 | 1 | 0 | 不要 | 不要 |
境界条件
電気的境界条件
1.定電圧1(0V)
図3に示すように、上部の膜は接地されています。矢印は、それに与えられた境界条件の記号を示しています。
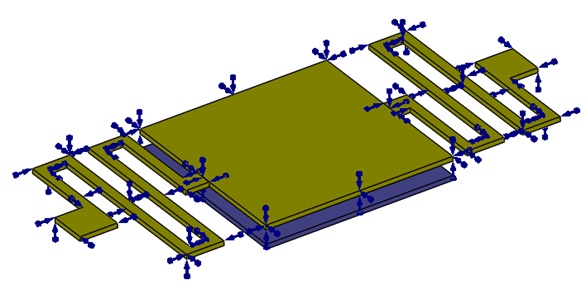
図 3 -上部メンブレンに印加される固定電圧
2.固定電圧2(正電圧)
固定電極には正の電圧が割り当てられます。図4は、電圧が印加される場所を示しています。
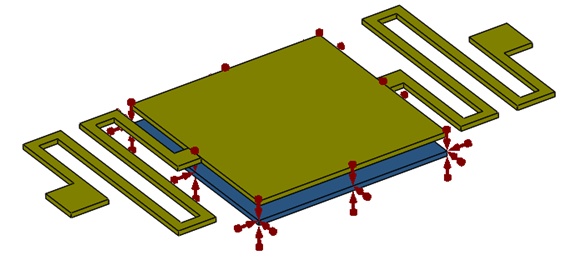
図 4 -下部メンブレンに印加される固定電圧
構造境界条件
図 5 に示すように、底部膜と 2 つの蛇行ばねのアンカーに固定境界条件が適用されます。
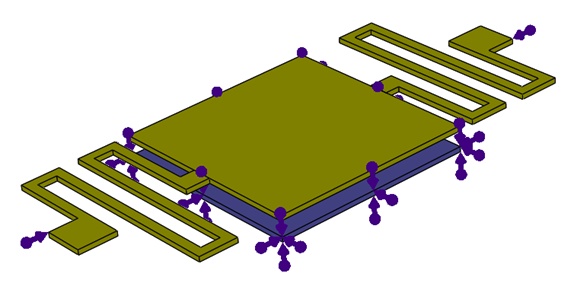
図 5 -下部膜に適用された固定拘束
メッシュ生成
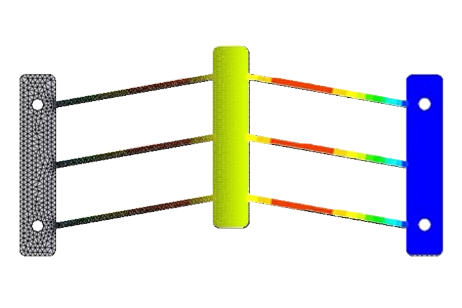
モデルジオメトリには、非常に複雑な形状は含まれていません。モードのすべての固体にメッシュ調節が適用されています。これは、正確な電気的および構造的な結果を得るには十分です。図 6 は、生成されたメッシュを示しています。
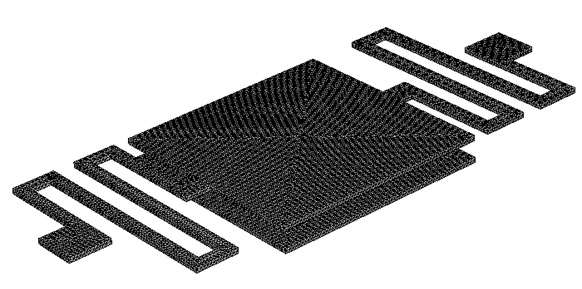
図 6 -メッシュ モデル
解析結果
底部膜には異なる電圧が印加されています。生成された静電力は、上部膜のたわみの原因です。
図 7 は、参照結果と比較して、EMS によって計算された印加電圧の関数として得られた変位を示しています。
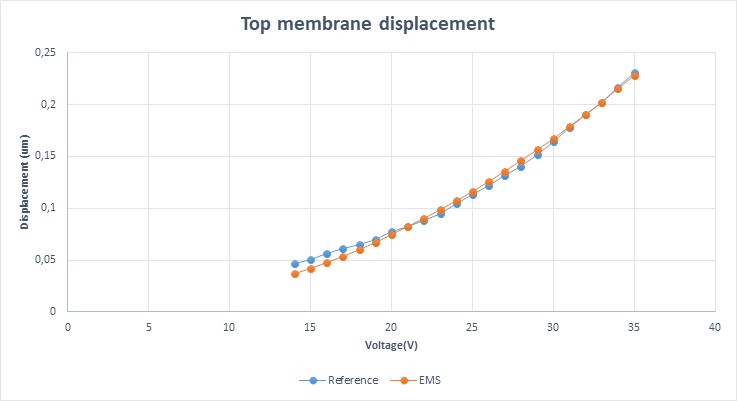
図 7 - EMS とリファレンスの電圧の関数としての変位
33v 印加電圧の結果の視覚化:
EMS は、構造部品に作用する合成電気剛体力を見つける可能性を提供します。私たちの場合、上部の膜に作用する電気力を見つけることに興味があります
表 2 は、膜に作用する電気力ベクトルの成分を示しています。力はニュートンで与えられます。
電気力(結果表)

分析式
V: 底部膜に印加される電圧
EMS と参照結果の相関:
表 3 - EMS と参照結果の比較
| EMS結果 | 参考結果 | |
33V ( | 0.202591 | 0.201708 |
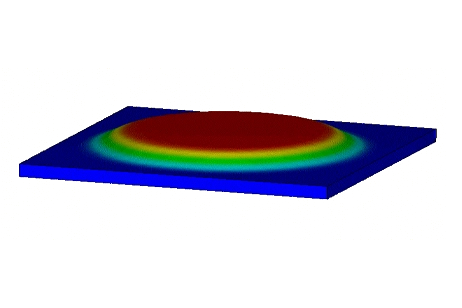
合成変位プロット:
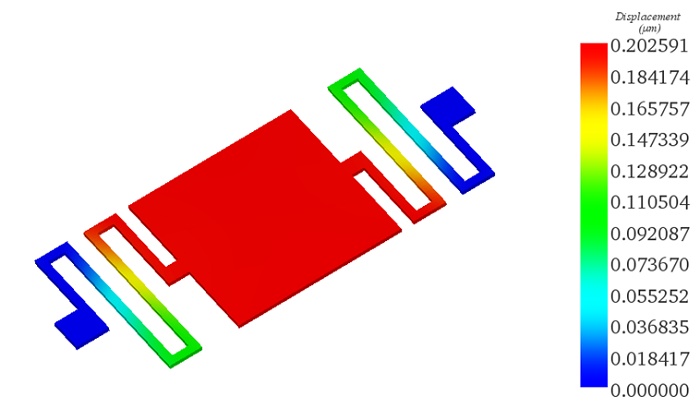
図 8 は、最大変位が正方形の膜で発生することを示しています。
結論
EMS 解析ソフトウェアを使用して、2 つの蛇行ばねを備えたマイクロセンシング膜の構造的挙動が調査されました。計算された変位は、参照結果 [2] とよく一致しています。
この数値解析は、MEMS デバイスがさまざまな 直流電圧入力にどのように応答するかを理解するのに役立ちました。検討したケースでは、底部膜の変位は印加電圧の増加とともに増加し続けました。
参考文献
[2]: P. A. Manoharan and D. Nedumaran, 2010, “Modeling-Simulation and Analysis of MEMS Capacitive Millibar Pressure Sensor,” J. Nanotechnol. Eng. Med 1(4)