序章
微小電気機械システム (MEMS) は、高度に成長している分野です。それらは、埋め込まれたマイクロ流体デバイスを含む生物医学産業などのさまざまなアプリケーションでのマイクロスケールデバイスの調査を可能にします。マイクロ ポンプは、マイクロ流体システムに不可欠な MEMS コンポーネントの 1 つであり、薬物送達のためのナノリットル フローの化学制御、ならびに化学分析および混合において大きな可能性を秘めています。
電磁作動に基づくマイクロ ポンプは、生物医学アプリケーションのニーズに適用されている一般的な統合デバイスです。これらのマイクロ ポンプは、必要な流れを生成するためのコンパクトな作動方法を必要とする新たなマイクロ流体分野を生み出しました。一般的に使用されるマイクロ ポンプの 1 つは、バルブレス作動式のものです。
マイクロバルブレス作動ポンプ
マイクロバルブレスポンピング機構の構造を本論文で研究した。これは、柔軟な PDMS メンブレンに取り付けられた電気めっき永久磁石と、固定マイクロコイルを保持するベースガラス基板で構成されます。そのようなタイプのマイクロポンプは、かなりの駆動流圧力を作り出すことを可能にする。ポンピング操作では、コイルと磁石の間に電磁力が確立され、結果として PDMS ダイアフラムがたわむように、マイクロコイルに電流を印加することにより、流体がポンプを介して駆動されます。 PDMS は、優れた柔軟性を備えているため、膜の材料として特別に選択されています。
その結果、ダイアフラムのたわみが大きいため、低電流と低周波数でレートを簡単に制御できます。
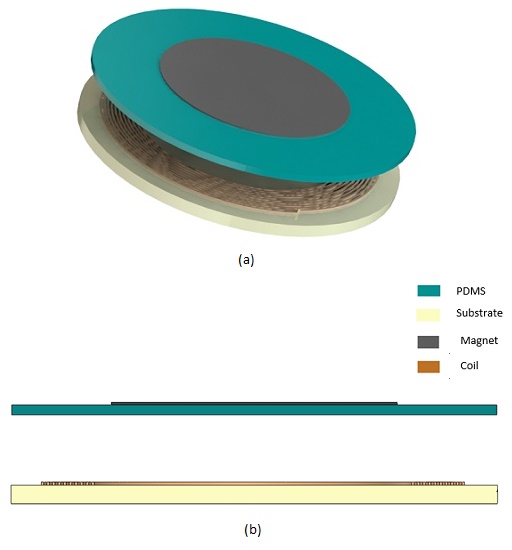
図 1 は、マイクロ ポンプの実際のプロトタイプと作動機構全体の概略図を示しています。
![作製したマイクロポンプの写真 [1] a)。およびその模式図 b)。](/ckfinder/userfiles/images/A-picture-of-the-fabricated-micro-pump-%5B1%5D-a%29-and-its-schematic-illustration-b%29.jpg)
モデリングと問題の説明
この解析では、構造解析に結合された EMS の静磁モジュールが使用されます。これにより、コイルと磁石の相互作用によって生成される、磁気負荷にさらされた柔軟な膜の機械的たわみの計算と視覚化が可能になります。
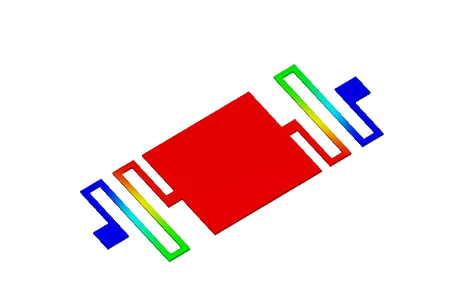
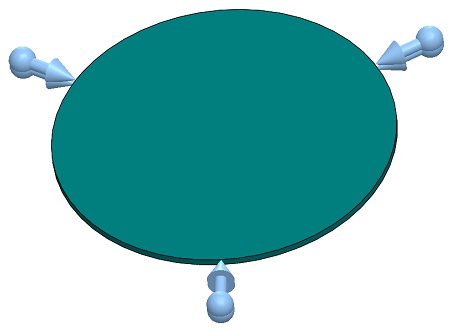
提案されたマイクロ ポンプの設計を図 2 に示します。
次の表は、主要なモデル コンポーネントの寸法を定義しています。
| 材料 | 半径 ( μm) | 厚さ( μm) | 弾性限界力 ( µN) |
| PDMS | 1950年 | 80 | 315 |
| 材料 | 内半径 ( µm) | 外径( μm) | 幅( μm) | ターン | 抵抗( ?) |
| 銅 (Cu) | 1250 | 1725年 | 25 | 10 | 3.23 |
| 材料 | 半径( μm) | 厚さ( μm) | コイルベースからの距離( μm) |
| 接続 | 1150 | 20 | 620 |
材料特性
| 材料 | 密度 (Kg/ | 透磁率 | 電気伝導性 (S/m) | 弾性率 (パ) | ポアソン比 | 磁化 保磁力(A/m) 残存(T) |
| 銅 (Cu) | 8900 | 0.99 | 5.7 E+07 | 不要_ | いいえ 必要 | |
| PDMS | 1030 | 1 | 0 | 0.75E + 6 | 0.49 | |
| ガラス | 不要 | 1 | 0 | 不要 | ||
| 接続 | 1.88 | 0 | 47700 0.3 | |||
電磁入力:
インダクタ コイルは、0.4 ~ 1 A rms の電流入力範囲をサポートするソリッド コイルとして定義されます。
機械的境界条件
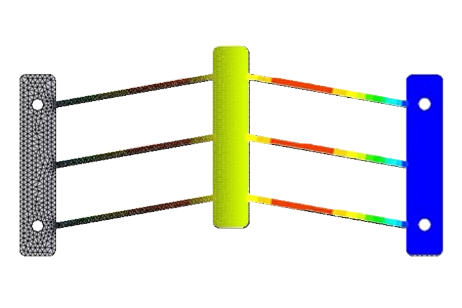
図 3 に示すように、固定境界条件が PDMS 膜の横方向の円筒面に適用されます。
メッシュ化
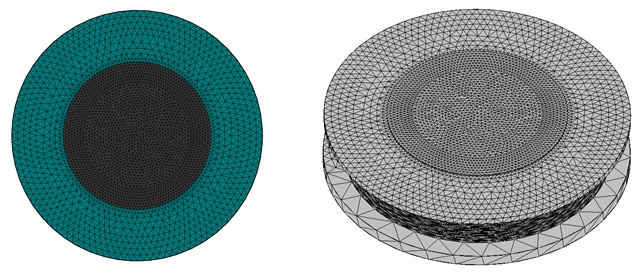
図 4 -メッシュ モデルの上面図と等角図
結果
参照 [2] によって固定された必要な作動力とダイアフラムのたわみを達成するために、EMS ツールを使用して、0.4A ~ 1A の範囲のさまざまな電流入力に対して一連の数値シミュレーションが実行されました。対応する得られた結果を以下の図に示します。
図 5 は、印加電流入力 (0.4 A ~ 1 A) に対する合成磁力の変化を示しています。参照 [2] の結果と EMS ツールから得られた結果との間に良好な一貫性が見られます。
![リファレンス [2] と EMS の両方の結果に対する、電流入力に対する磁力の変化。](/ckfinder/userfiles/images/Magnetic-force-variation-versus-current-inputs-for-both-Reference-%5B2%5D-and-EMS-results..jpg)
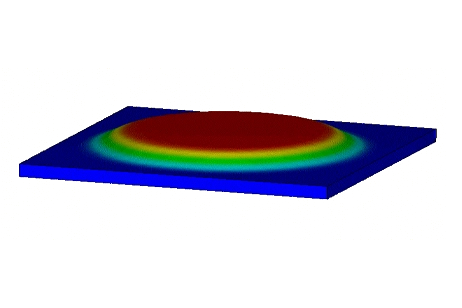
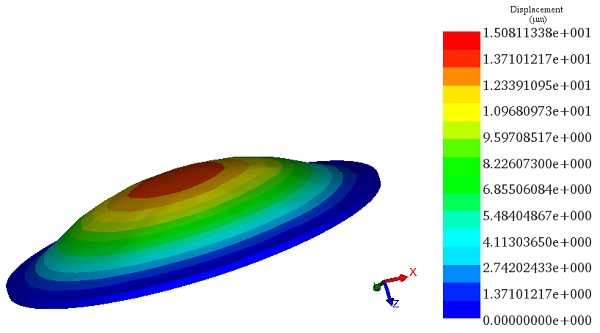
それに作用する磁力の影響下で、PDMS ダイヤフラムは上向きに曲がっています。 0.9A の電流入力に対応する 16.5µN で 15.08µm の最大たわみを達成します (図 6)。
得られた結果は、参考文献 [2] に記載されている目的の膜変位によく対応しています。これにより、マイクロスケール ポンプの能力が向上し、エネルギー消費を抑えながら膜の大幅なたわみを達成できます。
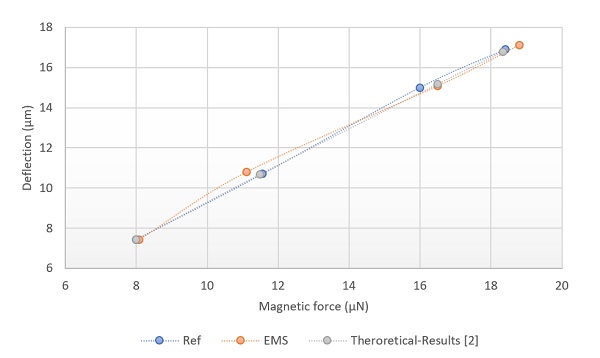
シミュレーション、解析 [2] および EMS の結果の 2 番目の比較を図 7 に示します。電流範囲 [0.4A..1A ]。
さまざまな結果と、低電流下でのマイクロ ポンプ作動の磁気機械的挙動を推定する EMS シミュレーション ツールの機能との間の良好な一致が確認されます。
結論
参考文献 [2] によって提案されたマイクロバルブレスポンプの理論モデルは、EMS ソフトウェアの磁気構造解析によって調査されています。得られた機械的結果は、論文で与えられた計算された分析結果を検証します。
このように、EMSは、マイクロポンプの要件を満たす確立された電磁アクチュエータ設計を確認することを可能にしました。マイクロポンプは、生物医学用途のニーズに十分に対応する所望のダイアフラムのたわみを達成するのに十分な作動力を生成することができます。
参考文献
[2]- Chang, Hsien-Tsung, et al. "Theoretical analysis and optimization of electromagnetic actuation in a valveless microimpedance pump." Microelectronics journal 38.6-7 (2007): 791-799.