序章
触覚デバイスにおける触覚の再現には、さまざまな開発された作動メカニズムが使用されます。この論文では、提案された触覚マイクロアクチュエータは、マイクロ磁気機械システムに基づいています。それは、高い磁力の下でその変形可能なアクティブな表面の高いたわみを可能にします。したがって、機械的耐性の高いエラストマー材料の使用は、そのような触覚アプリケーションにおいて、従来の PDMS の代替として首尾よく処理されました。
提案されたモデルは、2 mm ピッチのパルス駆動静磁マイクロアクチュエータの配列で構成されています。これは、マイクロエンジニアリングとマイクロファブリケーション技術を結合するハイブリッド設計に関連する選択であることが証明されました。メカニズム。
図 1 に、検討した触覚デバイスの構造を示します。
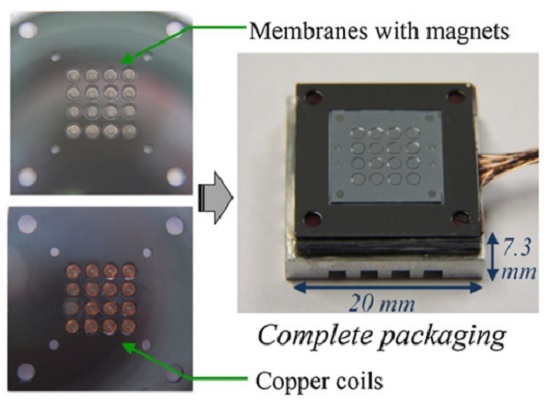
図 1 - 4×4 マイクロ アクチュエータ アレイ: パッケージへの取り付けと統合 [2]。
問題の説明
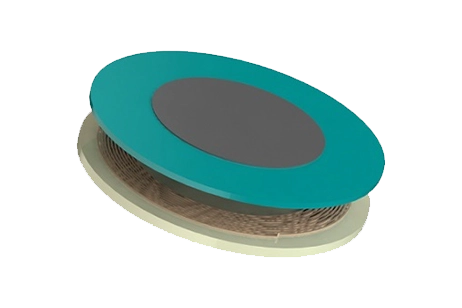
この論文で提案された静磁マイクロアクチュエータ配列は、2mmの分解能を持つ4×4の個別駆動マイクロアクチュエータで構成されています。各設計は 2 つの部分で構成されています。最初の部分は、中央にマイクロマグネットを保持するシリコン基板に基づいた PDMS で作られたモバイル エラストマー メンブレンで構成されています。 2番目の部分は、磁石の下に固定された銅コイルを保持し、強磁性コアを取り囲んでいます。全体の寸法を表 1 に示します。 ![図 2: a)。触覚マイクロアクチュエータの断面図 [1] b) 3D CAD 設計](/ckfinder/userfiles/images/Cross-sectional-view-of-the-tactile-micro-actuator-%5B1%5D%20b%29-3D-CAD-design.jpg)
図 2 - a)。触覚マイクロアクチュエータの断面図 [1] b) 3D CAD 設計。
表 1 : コンポーネントの寸法
| 部品 | 寸法 (mm) | ||||
| コイル | 内径 | 外径 | 身長 | ||
| 0.5 | 1.2 | 1.8 | |||
| PDMSメンブレン | 長さ | 身長 | 幅 | ||
| 2 | 2 | 0.8 | |||
| 基板 | 外側部分 | 長さ | 身長 | 幅 | |
| 2 | 2 | 0.8 | |||
| 内部パーツ | 内径 | 外径 | 厚さ | ||
| 1.2 | 1.7 | 0.8 | |||
| 磁石 | 直径 | 身長 | |||
| 1 | 0.5 | ||||
| 芯 | 直径 | 身長 | |||
| 0.5 | 1.8 | ||||
| コイルと磁石の隙間 | 0.4 | ||||
解析設定
この検討の主な目的は、コイルと磁石の相互作用の磁気作動力によって生成される PDMS 膜のたわみを計算して視覚化することです。 EMS の静磁モジュールを構造解析に結合して FEM シミュレーションを実行しました。
次の手順では、必要な解析の設定を定義します。1.適切な材料を選択します。
| 部 | 材料 | 密度 (Kg/ | 透磁率 | 電気伝導性 (S/m) | 弾性率 (パ) | ポアソン比 | 磁化 保磁力(A/m) 残存(T) |
| コイル | 銅 (Cu) | 8900 | 0.99 | 5.7 E+07 | 不要_ | 不要 | |
| 膜 | PDMS | 1030 | 1.38 | 0 | 2E+6 | 0.49 | |
| 基板 | シリコン (Si) | 2329 | 1 | 0 | 159E+9 | 0.27 | |
| 芯 | パーマロイ(NiFe) | 不要 | 82000 | 0 | 不要_ | ||
| 磁石 | ネオジム鉄ボロン (NdFeB) | 1.175 | 0 | 954929 1.4 | |||
2.電磁入力:
インダクタ コイルは、表 3 で定義される巻線コイルとして定義されます。
| ターン数 | 線径 (mm)。 | RMS 電流振幅 (A) | |
| 巻きコイル-1 | 48 | 0.15 | 0.8 |
3.機械的境界条件:
図 3 に示すように、PDMS 膜の 4 つの側面に固定境界条件が適用されます。
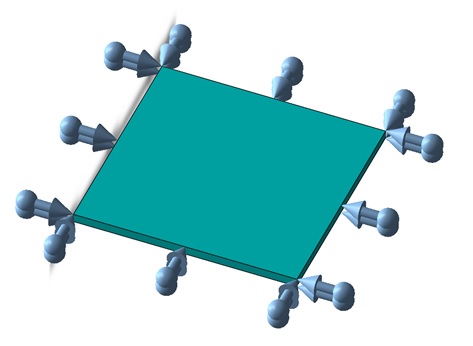
図 3:適用された機械的境界条件。
メッシュ生成
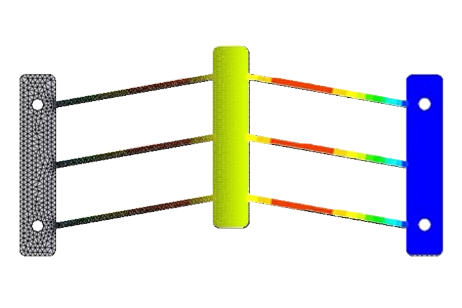
正確な磁力計算を取得し、応力と変形の計算に十分な要素を保証するには、変形部分 (弾性膜) のメッシュを改良する必要があります。下の図は、細かいメッシュ調節が上部パーツに適用されたメッシュ モデル全体を示しています。
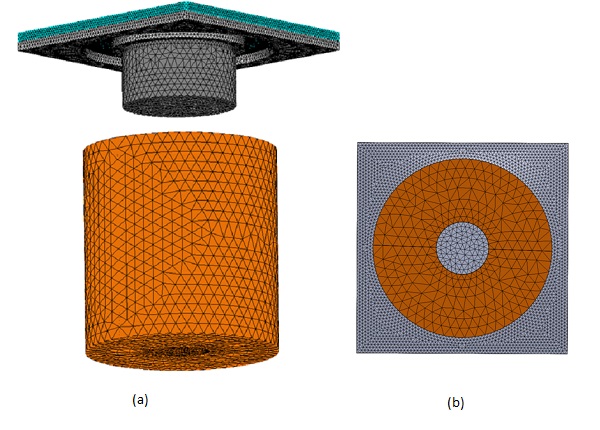
図 4 - a)。メッシュ化されたモデル全体 b)。底面図。
結果
EMSツールを使用してマルチフィジックス解析を実行し、磁石とコイルの間の相互作用から生じる磁力を決定しました。得られた結果を下図に示します。
コアと磁石部分の両方の磁束分布は、図 5 で視覚化されます。
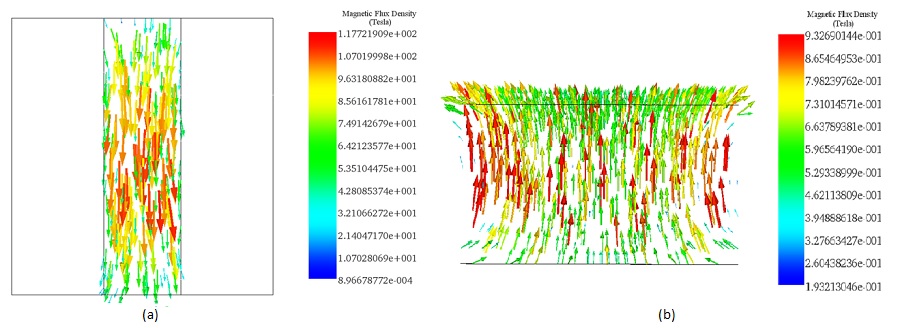
図 5 - a) を横切る磁束分布。コアと b)。マグネット部分。
表 4:コイルと磁石の相互作用を定義する仮想作業の EMS 結果テーブル。
| Fx 軸 (N) | FY軸(N) | Fz軸(N) | |
| 仮想作業 - 1 | 2.7957e-005 | 7.9450e-005 | 5.1816e-003 |
リファレンス [1] と EMS の結果の間の相関関係は、得られた磁気作動力と PDMS 膜の最大たわみ値の結果から非常によく表れています。表 5 は、この合意を示しています。
表 5: EMS と参照 [1] の結果の比較表。
| 結果 | EMS | 参照 [1] |
| 作動力 (mN) | 5.18 | 5 |
| 最大たわみ (µm) | 108.9 | 108.6 |
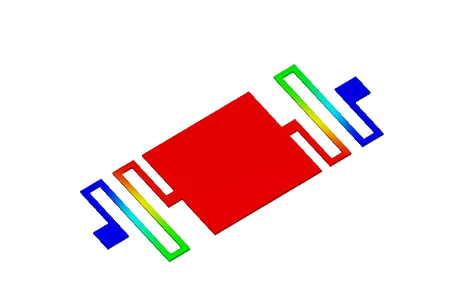
図 6 に示すように、膜に作用する磁力の影響下で、膜は大きなたわみの大きさで中心に向かって曲がります。
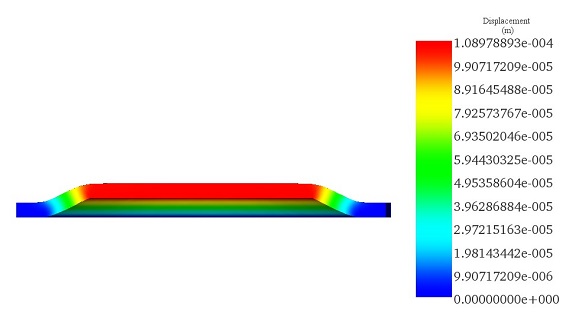
図 6 -膜の結果変位の断面プロット。
結論
この論文では、静磁マイクロ作動とポリマーベースのMEMS処理における進歩の調査を紹介します。このようなタイプの触覚ディスプレイアクチュエータの特性評価は、低消費電力に関して、生成された力と小さなスケールでのたわみに関して、優れた性能と満足を示しました。
得られた EMS の結果は、作動周波数とは無関係に、触覚デバイスの触覚を満足させる静磁マイクロメカニズムの能力を確認します。
参考文献
[1].Streque, Jeremy, et al. "New magnetic microactuator design based on PDMS elastomer and MEMS technologies for tactile display." IEEE Transactions on Haptics 3.2 (2010): 88-97.
[2]. Streque, J., et al. "Pulse-driven magnetostatic micro-actuator array based on ultrasoft elastomeric membranes for active surface applications." Journal of Micromechanics and Microengineering 22.9 (2012): 095020.