序章
静電型櫛歯駆動アクチュエータは簡単な設計、製造および実装の利点を持っています。それらは、光通信、生物医学工学、無線通信、ナノテクノロジーなど、さまざまな応用に使用されています。移動距離と力出力の増加は、櫛歯駆動アクチュエータの開発における 2 つの主要な懸念事項です。
アクチュエータは、2 つの相互にかみ合った構造で構成されています。 1 つは固定され、もう 1 つは適切なサスペンションに接続されています。可動部分は 4 本の指で構成され、固定部分は 5 本の指で形成されます。
コーム構造間の駆動電圧は、静電引力によって可動指を固定フィンガに向けて変位させる。
EMS 電気構造モジュールは、直流電圧が印加された状態で指を動かすことで得られるたわみを検出することを目的としています。
私たちの分析では、電気力以外の力は考慮していません。重力加速度は無視されます。
モデルのジオメトリ
図 1 は、解析されたモデルのジオメトリを示しています。デバイスの厚さは、z 軸に沿って 2um です。単位はすべてマイクロメートルです。
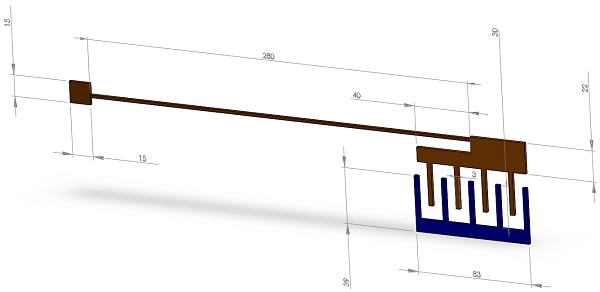
図1 - 解析されたアクチュエータのジオメトリ
材料
以下の表 1 は、解析に必要な材料特性をまとめたものです。| 材料名 | 比誘電率 | 電気伝導率 (Mho/m) | 弾性率 (N/m2) | ポアソン比 |
| ポリシリコン | 4.5 | 不要 | 160e+09 | 0.22 |
| 空気 | 1 | 0 | 不要 | 不要 |
表 1 -モデルに割り当てられた材料の特性
境界条件
電気的境界条件
定電圧1(0V)
図 2 に示すように、青色の指は接地されています。矢印は、指に与えられた境界条件の記号を示しています。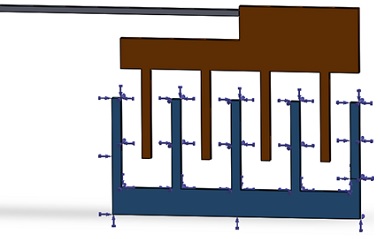
図 2 -上指に固定電圧を印加
定電圧2(30V)
アクチュエータの可動部分には正の電圧が割り当てられます。図3は、電圧が印加される場所を示しています。
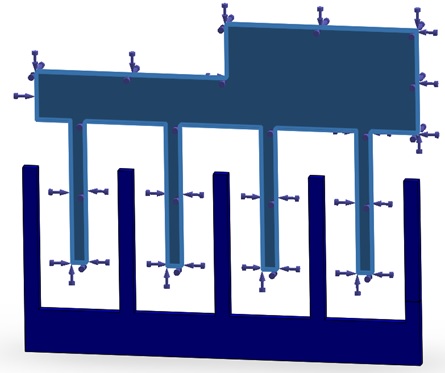
図 3 -下の指に印加される固定電圧
構造境界条件
固定境界条件

メッシュ生成
モデルジオメトリには、非常に複雑な形状は含まれていません。正確な電気的および構造的な結果を得るには、下の指を改良するためのメッシュ調節で十分です。
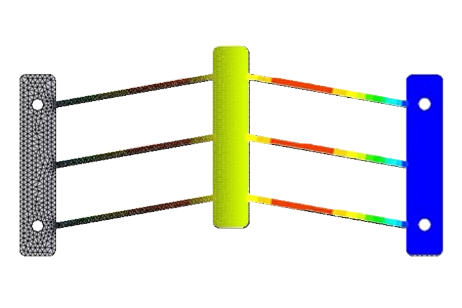
図4のように、可動部分は他の部分に比べてかなり細かいメッシュになっています。下の指をそのアンカーに接続する梁には、細かいメッシュは必要ありません。
上の指 (図 5 の青で着色されたボディ) は、たわみが発生しないように粗くメッシュ化されています。
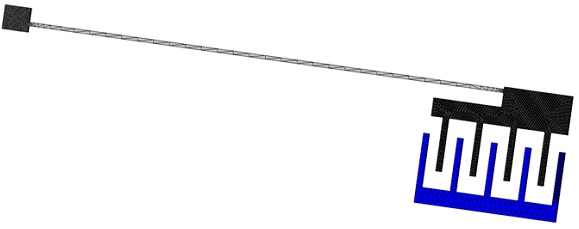
図 5 -メッシュ モデル
解析結果
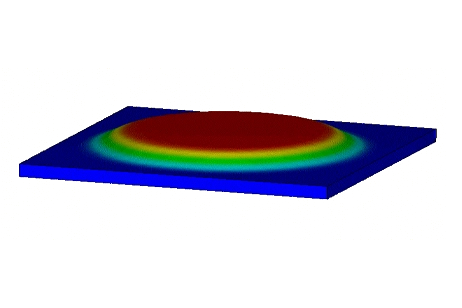
図 6 は、プレートに作用する電気力ベクトルの成分を示しています。力はニュートンで与えられます。
電気力(結果表)

理論式
C: アクチュエータの静電容量
V: 動く指にかかる電圧
n: 動いている指の数
t:アクチュエータの厚み
g:上指と下指の隙間
| EMS結果 | 理論結果 | |
| 30V 未満の合成変位 (メートル) | 4.16e-08 | 5e-08 |
反力(ばね復元力)

合成変位プロット
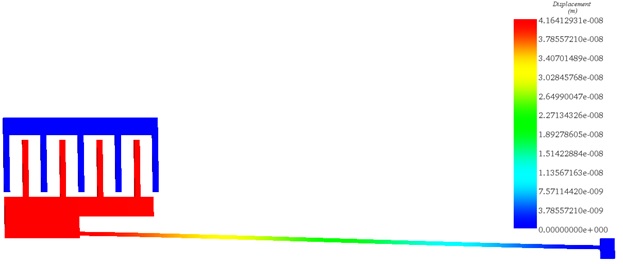
図 6 -アクチュエータの変形形状
結論
櫛歯駆動チュエータの電場・構造解析は、EMS内で行われます。 EMS の結果は、数値 ([1] に記載) および分析結果とよく一致することが示されています。
参考文献
[1]: S. Gupta, T Pahwa, R Narwal, B.Prasad and D. Kumar. Optimizing the Performance of MEMS Electrostatic Comb Drive actuator with different Flexure Springs.