序章:
マイクロ電気機械システム (MEMS) により、複雑なエンジニアリング デバイスのサイズをマイクロメートル スケールにまで縮小することが可能になり、マイクロポジショニング、マイクロフィクスチャリング、マイクロ操作などのさまざまな応用に使用できます。マイクロ熱アクチュエータは、熱エネルギーを力と運動に変換します。ここでは、比較的大きな熱誘導たわみを発生させる低電圧マイクロ熱アクチュエーターを検討します。
![サーマルアクチュエータの電子顕微鏡像[1]](/ckfinder/userfiles/images/Electron-microscope-image-of-thermal-actuator-%5B1%5D%20%282%29.jpg)
図1 -熱アクチュエータの電子顕微鏡像 [1]
問題の説明:
この検討で解析された U 字型アクチュエータは、コールド アームとホット アームの 2 つの平行アームで構成されています。それらは、図 2 のように、一方の側でパッド基板に接続され、もう一方の側で相互に接続されます。
熱構造解析と組み合わせた EMS 解析を使用して、温度膨張効果によって引き起こされるマイクロ デバイスの機械的変位を計算します。
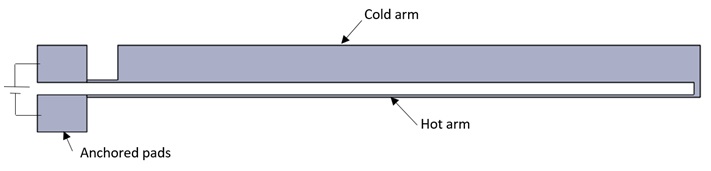
図 2 - U 字型熱アクチュエータの基本設計。
表 1:モデル寸法 [2]
| 部品 | 寸法 (μm) |
| ホットアームの長さ | 495 |
| ホットアーム幅 | 2 |
| コールドアームの長さ | 470 |
| コールドアーム幅 | 30 |
| 腕の分離 | 10 |
| コネクティングバー幅 | 10 |
| パッドの長さ | 40 |
| パッド幅 | 30 |
解析設定:
検討対象の熱アクチュエータデバイスの機械的変位を計算して視覚化するために、定常状態の熱および構造解析と共に静的磁場モジュールが使用されます。
解析設計は、次の手順で構成されます。- 適切な材料を選択します。
- 必要な電磁入力を定義します。
- 必要な熱入力を定義します。
- 構造境界条件を適用します。
- モデル全体をメッシュ化し、ソルバーを実行します。
この検討では、次の材料特性が使用されます (表 2)。
表 2:ポリシリコンの材料性質
| 性質 | 電気伝導性 (S/m) | 熱伝導率 (W/m.K) | 熱膨張係数 (/K) | 弾性率 (GPa) | ポアソン比 |
| ポリシリコン | 43.5 E+03 | 150 | 2.9 E-06 | 169 | 0.22 |

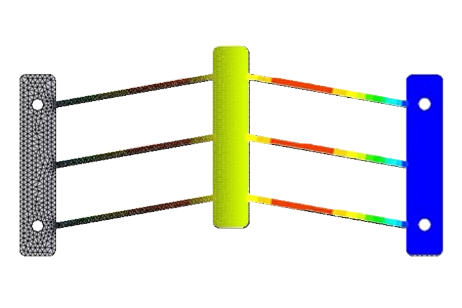
図 3 -適用された機械的境界条件。

図 4 -メッシュ モデル。
結果:
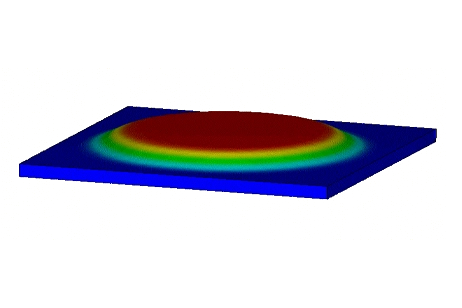
熱分布の最終的な解析結果を図 5 に示します。パッド間の電圧差が 2 つのアーム間の温度差を引き起こし、細いアームの最も重要なゾーンで 864°C の最大値を達成します。
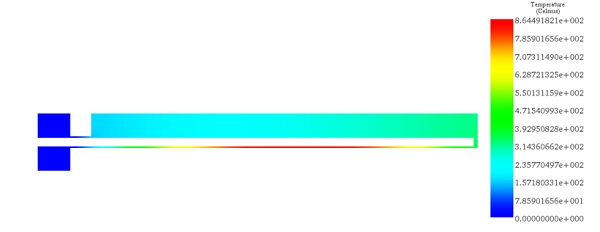
図 5 -アクチュエータ全体の温度分布。
熱膨張効果による機械的変位は 16.99 µm に達します。アクチュエータは、主に 2 つのアームを接続する領域で動いています。
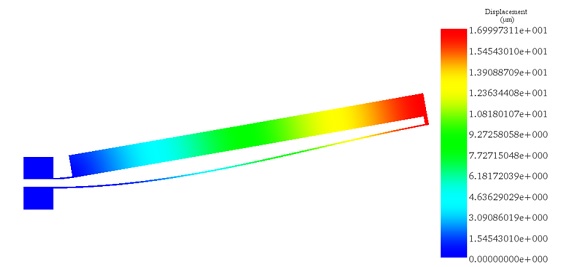
図 6 -結果の変位プロット。
アクチュエータのたわみに関する EMS と参照 [2] の結果の比較を表 3 に示します。
表 3: EMS と参照 [2] の結果の比較表。
| EMS | 参照 [2] | |
| たわみ (μm) | 16.99 | 17 |
結論:
EMS ツールは、微細加工された熱アクチュエータの性能の検証と予測を可能にします。低電源電圧下で大きなたわみを生成する能力の評価と検証に成功しました。