序章
MEMSに基づいたマイクログリッパーは、マイクロ操作、マイクロアセンブリなどのさまざまなエンジニアリング応用における小型化デバイスで優れた柔軟性と適応性を発揮します。
アクチュエータを統合された一体型マイクログリッパーは、いくつかのマルチフィジックス解析の対象です。このような解析は、低消費電力でのマイクログリッパーの機械的操作を研究するために使用されます。
検討対象のマイクログリッパー (図 1) は、2 つの U 字型アクチュエータに取り付けられた 2 つのグリップチップで構成されています。このデバイスは、印加されたDC電圧の下で両方のアームをたわませることにより、微小物体を保持するために使用されます。
![研究されたマイクログリッパーは、その両方の先端の間にボールを保持しています [1]](/ckfinder/userfiles/images/The-studied-micro-gripper-holdding-a-ball-between-its-both-tips%5B1%5D.jpg)
図 1 -研究対象のマイクロ グリッパーは、両方の先端の間にボールを保持しています [1]。
問題の説明と設計
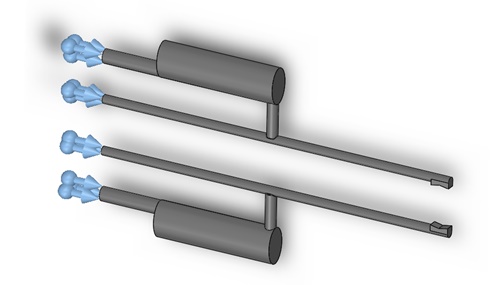
マイクロ グリッパーの性能は、EMS 有限要素ツールを使用してモデル化され、その変位と温度分布が推定されます。概略図と 3D モデルを図 2 に示します。
![マイクログリッパーの模式図 [1] a)。 3D モデル b)。](/ckfinder/userfiles/images/Schematic-illustration-of-the-micro-gripper-%5B1%5D-a%29.-3D-Model-b%29..jpg)
図 2 -マイクログリッパーの模式図[1] a)。 3D モデル b)。
表 1 -モデルの寸法 [1]
| パラメータ | シンボル | 値 (mm) |
| ホットアームの長さ ホットアームの幅 ホットアームの太さ | 4.5 0.21 0.21 | |
| 中間アームの長さ 中間アームの幅 中間アームの太さ | 0.8 0.27 0.25 | |
| コールドアームの長さ コールドアームの幅 コールドアームの太さ | 3 0.9 0.63 | |
| フレクシャーアームの長さ フレクシャーアームの幅 フレクシャーアームの厚み | 1.5 0.35 0.3 | |
| 全長 | 9 | |
| 初期ギャップ | 1 |
解析設定
EMS の静磁モジュールは、熱および構造解析と組み合わせて使用され、マイクロ グリッパーの熱的および機械的挙動を予測および評価します。
解析設計は、次の手順で構成されます。
- 適切な材料を選択します。
- 必要な電磁入力を定義します。
- 必要な熱入力を定義します。
- 構造境界条件を適用します。
- モデル全体をメッシュ化し、ソルバーを実行します。
材料
この検討では、次の材料特性が使用されます (表 2)。
| 性質 | 密度 (Kg/ | 電気伝導性 (S/m) | 熱伝導率 (W/m.K) | 熱膨張係数 (/K) | 弾性率 (GPa) | ポアソン比 |
| 銀ニッケル複合体 (Ag-Ni) | 2370 | 31903 | 66.7 | 120 E-06 | 21.5 | 0.3 |
電磁入力
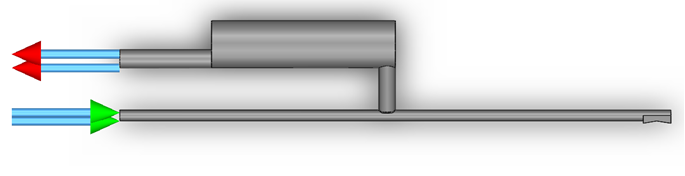
マイクログリッパーの各拡張チップは、1.54 Vの電圧をかかれた固体コイルとして定義され、入口/出口ポートが図 3 に示されています。
熱入力
両方の固定パッドに 27°C の熱境界条件が適用されます。熱対流は、10 W/m²K に設定された係数で、周囲温度で空気体に適用されます。
構造境界条件
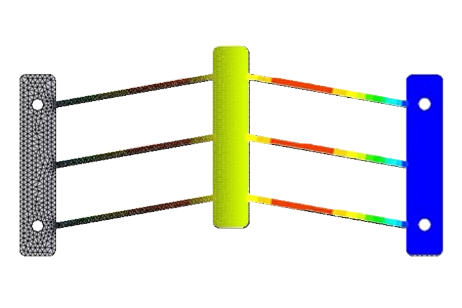
図 4 に示すように、固定されたパッドの両側に固定境界条件が適用されます。
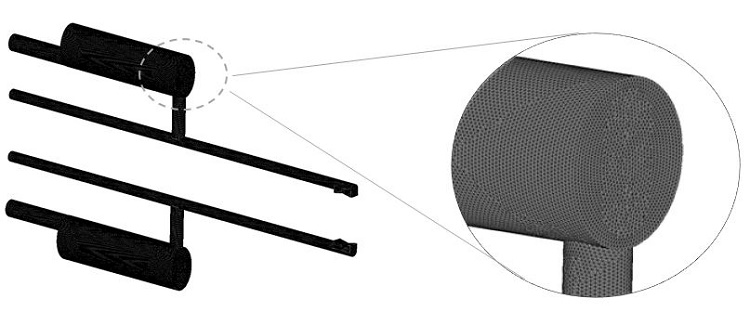
メッシュ生成
より正確な結果を得るために、下の図に示すように、モデル全体が細かく制御されたメッシュを使用して EMS 内でメッシュ化されます。
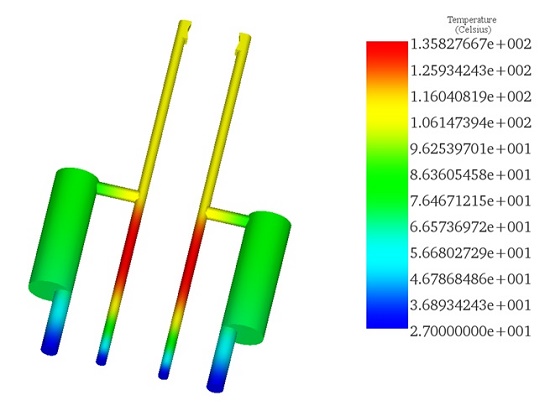
結果
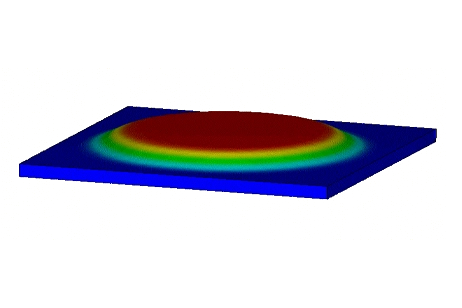
解析により、以下の結果が明らかになりました。図 6 は、0.26 A 付近の入力電流値に対してホットアームで発生する最大温度分布を示しています。
機械的変位の結果では、各拡張チップは 166 μm の最大たわみに達します。
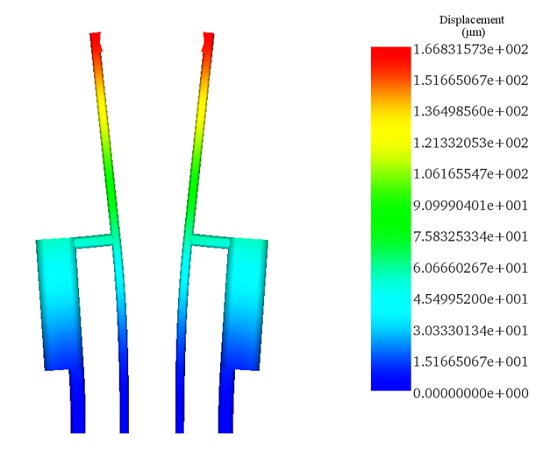
同じ入力印加電圧について、表 3 は参考文献 [1] と EMS ツールによって与えられた測定結果とシミュレーション結果の比較を示しています。
| 結果 | 解析[1] | 測定 [1] | EMS |
| 最大合計変位( µ m) | 322 | 311 | 332 |
| 最高温度( ℃ ) | 155 | 123 | 135 |
結論
EMS マルチフィジックス機能により、電気駆動のマイクロデバイスの正確な解析が保証されます。提示された例では、ジュール効果によって引き起こされるより高い温度は、マイクロ グリッパーでより高い変位を生成します。
参考文献
[1]. Feng, Yao-Yun, et al. "Fabrication of an electro-thermal micro-gripper with elliptical cross-sections using silver-nickel composite ink." Sensors and Actuators A: Physical 245 (2016): 106-112.