電気モーターは、産業用アプリケーションでますます使用されるようになっています。高効率、高力率、広い速度範囲を提供します。スポーク型モーターは、今日市場に出回っている一般的な電気モーター類の 1 つです。
スポーク型モーターは、スポークに配置されたコンパクトな永久磁石構造を使用して、より優れたトルク生成を実現します [1]。適切な材料を選択することで、スポーク 型モーターは、永久磁石モーター類の中で最高のトルク密度アーキテクチャを備えていますが、費用対効果の高い方法で製造され、特に効果的に冷却されていることが前提となります [1]。
このアプリケーション ノートでは、SOLIDWORKS 内の EMWORKS2D ソフトウェアを使用して、調査中の 24 スロット/8 極スポーク 型モーターの無負荷および負荷解析を計算します。
図 1 は、SOLIDWORKS を使用して設計された、調査対象の 24 スロット/8 極スポーク モーターの 2D モデルを示しています。
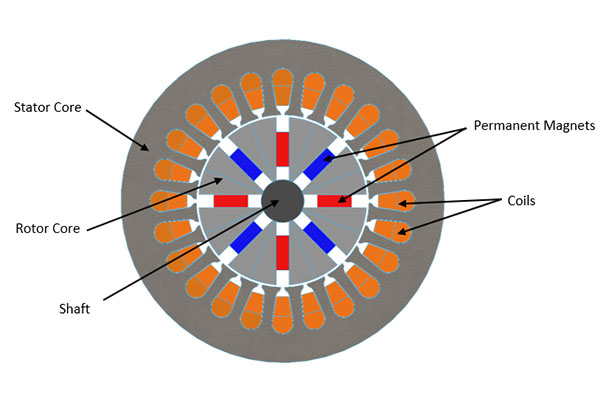
図 1 - SOLIDWORKS を使用した 24 スロット/8 極スポーク 型モーターの 2D 断面。
スポークモーターの設定
1-材料の選択
スポーク型モーターは、素材の選択がモーターの性能に直結します。 [1] で示されているように、磁石の最適な材料はネオジム鉄ホウ素であり、冷却を維持できるからです。表 1 に、検討中のスポーク モーターに使用される材料を示します。
表 1 -検討中のスポーク モーター用に選択された材料。
| モーター部品 | 材料 |
| ステーター | AISI 1010 鋼 |
| ローター | AISI 1010 鋼 |
| 磁石 | ネオジム: N4212 |
2-磁石の保磁力方向
スポーク モーター磁石の保磁力の方向は、ローカルのデカルト座標系で表されます。磁石の磁化の方向は、図 2 に示すように、正 (北の磁石の場合) または負 (南の磁石の場合) のいずれかです。
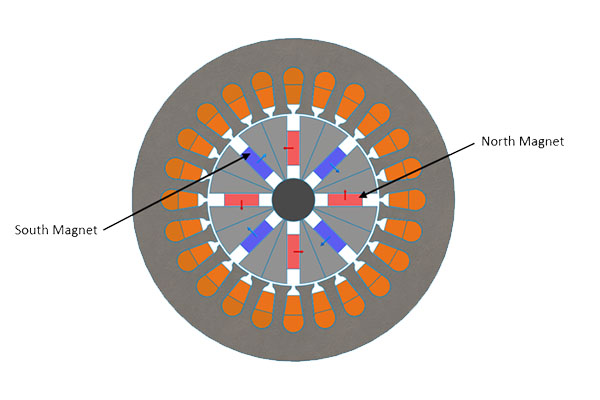
図 2 -スポーク 磁石の保磁力方向。
3-定義されたローター角度
SOLIDWORKS では、ローター角度は、図 3 に示すように、回転するローター軸とステーターの固定軸の間の角度として定義されます。
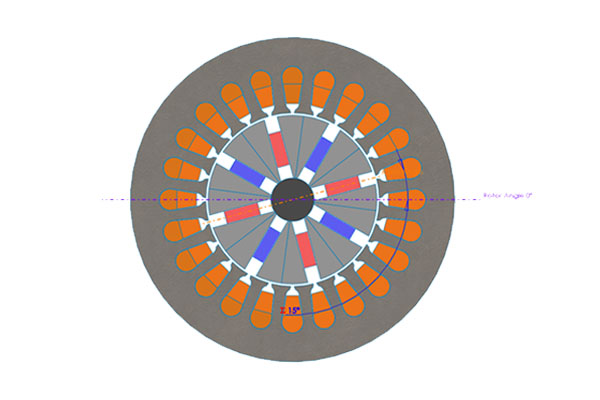
図 3 - SOLIDWORKS でのローター角度の定義。
4-定義された巻線構成
検討中のスポーク 型モーターには 24 の二重層スロットが装備されており、1 つの並列パスを示し、各フェーズには 30 ターンが装備されています。
スポーク モーター (A、B、C) の 3 相巻線構成を図 4 に示します。
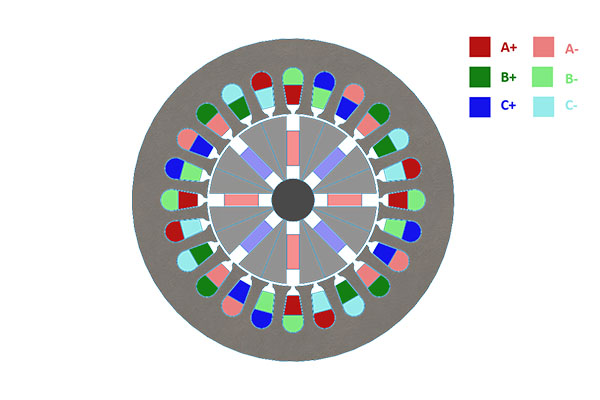
図 4 -スポーク モーターの巻線構成。
シミュレーションと結果
1-スポーク型モーターの無負荷解析
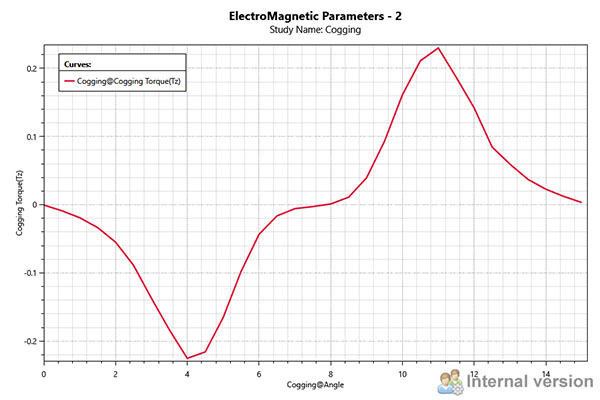
a- スポーク型モーターのコギングトルク
SOLIDWORKS内のEMWORKS2Dを使用して、スポーク型モーターのコギングトルクを1周期シミュレーションします。コギングトルクスタディのプロパティを表 2 に示します。コギング トルク対時間曲線を図 5 に示します。
| パラメータ | 価値 |
| シミュレーション開始時間 (秒) | 0 |
| シミュレーション終了時間 (秒) | 0.03 |
| ステップ シミュレーション時間 (秒) | 0.001 |
| 角速度 (度/秒) | 500 |
| 初期角度 (度) | 0 |
b- スポーク型モーターの無負荷解析
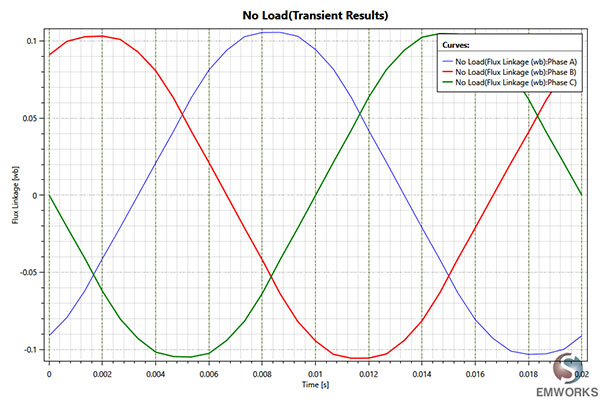
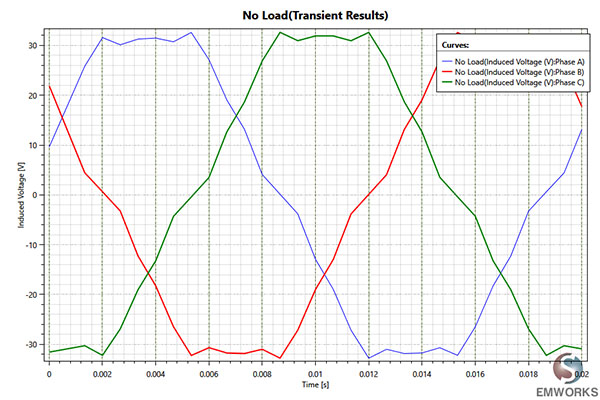
SOLIDWORKS内のEMWORKS2Dを使用して、スポーク型モーターの無負荷解析を1周期シミュレーションします。そのプロパティを表 3 に示します。3 相巻線リンケージ対時間曲線を図 6 に、3 相誘導電圧対時間曲線を図 7 に示します。
| パラメータ | 価値 |
| 周波数 (Hz) | 50 |
| シミュレーション開始時間 (秒) | 0 |
| シミュレーション終了時間 (秒) | 0.02 |
| ステップ シミュレーション時間 (秒) | 0.00066667 |
| 角速度 (度/秒) | 4500 |
| 初期角度 (度) | 0 |
c- スポーク型モーターの磁場マッピング
複数の無負荷解析結果の 1 つであるスポーク型モーターの磁場マッピングは、図 8 に示すように、0 度の初期角度位置で表示されます。
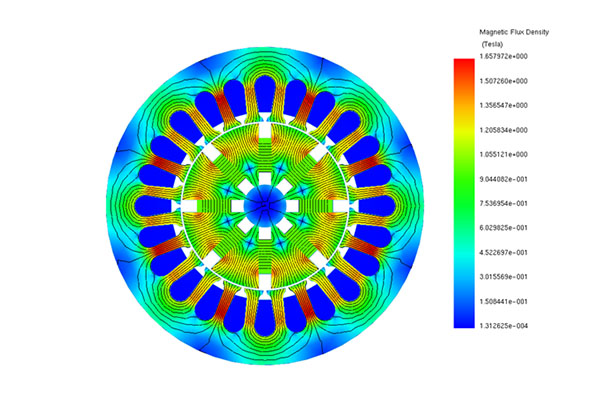
図 8 -無負荷状態、0 度でのスポーク 型モーターの磁場マッピング。
2-スポーク型モーターの負荷解析
a- スポーク型モーターの負荷トルク
スポーク型モーターは、負荷条件でシミュレートされています。適用される 3 相正弦波電流は、式 (1) で与えられます。ここで、負荷時のスタディ パラメータを表 4 に示します。
| パラメータ | 価値 |
| 周波数、f (Hz) | 50 |
| 最大電流、 | 10 |
| タイムシフト、 | 0.019 |
| シミュレーション開始時間 (秒) | 0 |
| シミュレーション終了時間 (秒) | 0.04 |
| ステップ シミュレーション時間 (秒) | 0.0005 |
| 角速度 (度/秒) | 4500 |
| 初期角度 (度) | 0 |
時間に対する負荷トルクの結果を図 9 に示します。
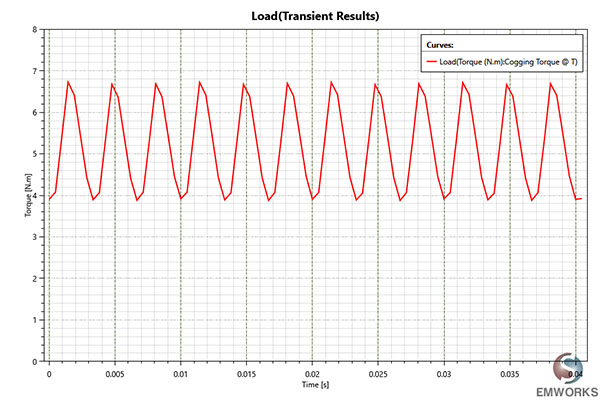
図 9 -スポーク 型モーターの負荷トルク対時間。
b-コア損失の結果
コア損失も調査されています。ローター コアとステーター コアの両方に適用された非線形 AISI 1010 鋼材のスタインメッツ損失係数は、表 5 に示すとおりです。
| 係数 | 意義 | 価値 |
| Kh | ヒステリシス損失係数。 | 2020年 |
| K c | 渦電流損失係数。 | 0.116 |
| ケ_ | 過剰損失係数。 | 3.31 |
検討対象のスポーク 型モーターの総鉄損と時間の関係を図 10 に示します。
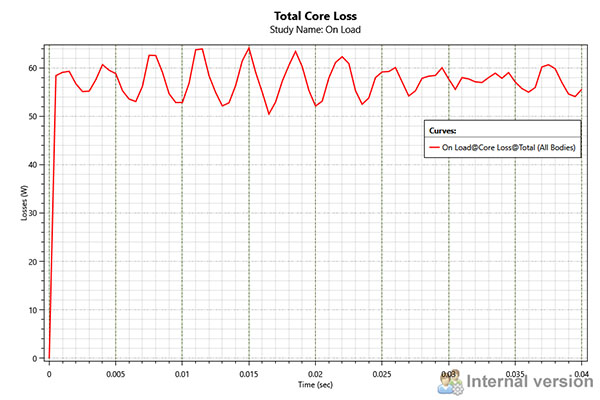
図 10 -スポーク モーターの合計コア損失対時間。
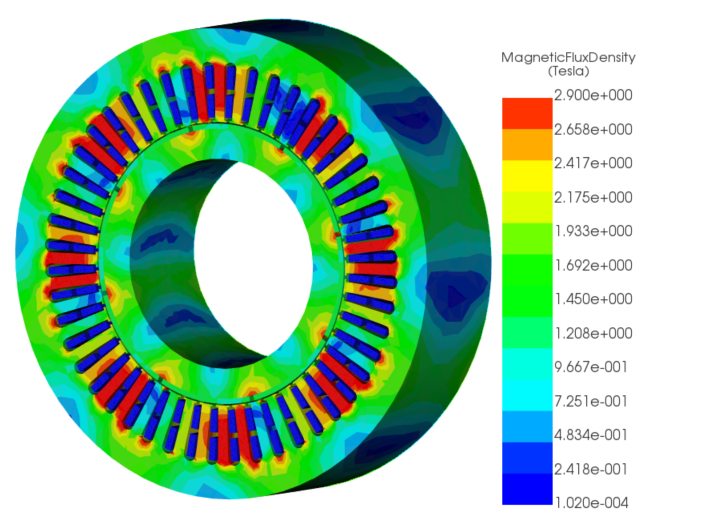
c- スポーク 型モーターの磁場マッピング
負荷がかかっている状態で、初期角度位置が 0 度の場合のスポーク モーターの磁場を図 11 に示します。
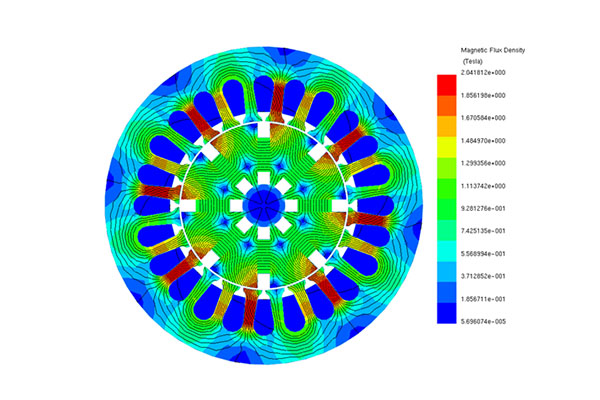
図 11 -無負荷状態でのスポーク 型モーターの磁場マッピング。