概要
リニア モーターの需要の増加は、主に、製造プロセスにおける従来の機械式 (ボール スクリュー、歯車列、カム)、油圧式、または空圧式のリニア モーション システムを直接電気機械式ドライブに置き換えることによって促進されています。またリニアモーターは、リニアモーターカーの高速輸送やエレベーターの巻き上げなど、さまざまな用途に使用されています。
リニア同期モーター (LSM) は、次のように分類できます。- フラット(平面)またはチューブラー(円柱)
- 片面または両面
- スロット付きまたはスロットレス
- 鉄芯または空芯
- 横フラックスまたは縦フラックス
このアプリケーション ノートでは、Solidworks 内の EMWorks2D を使用して、図 1 に示す 3 相両面 FLSM モーターのプロトタイプを解析します。
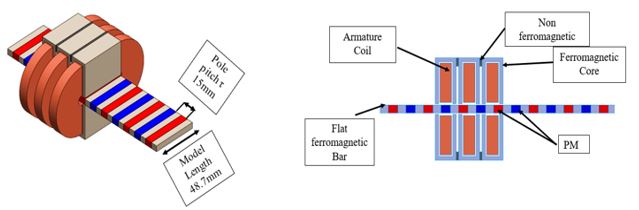
図 1. フラット スロット鉄心リニア同期モーター (FLSM) モデル
FLSM 設定
1.材料の選択
FLSM モデルで使用される材料を表 1 に示します。コアの強磁性材料にはステンレス鋼 1010 が使用され、高い保磁力と残留磁気を特徴とする希土類焼結 NdFeB グレード 35 が磁石として使用されます。したがって、これにより、モーターの性能が大幅に向上します。
表 1. FLSM 材料
| モーター部品 | 材料 |
|---|---|
| 電機子コイル | 銅 |
| 平らな強磁性棒 | ステンレス鋼 1010 |
| 強磁性コア | ステンレス鋼 1010 |
| 永久磁石(PM) | N35 |
| 非強磁性コア | アルミニウム |
2.保磁力方向と巻線配置
図 2 に示すように、保磁力の方向は、磁束が磁石から縦方向になるように選択されます。強磁性コアはそれらに十分に近いです。
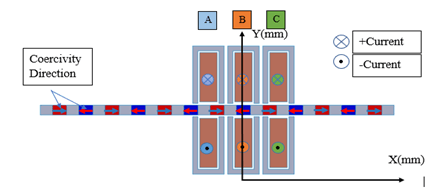
図2 保磁力方向と巻線配置
3. 直線運動の距離の定義
この距離は、図 3 に示すように、可動子 (磁石 + 強磁性棒) と固定コンポーネント (この場合は電機子 (強磁性コア + 電機子巻線)) の間の合致として定義されます。
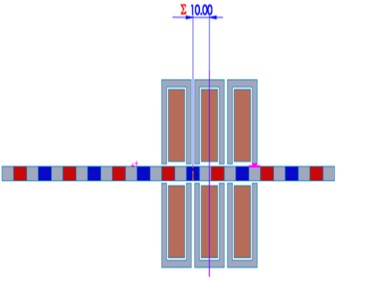
図 3. 距離の定義
シミュレーションと結果
1. FLSM (戻り止め力と逆起電力) の開回路シミュレーション
開回路または無負荷シミュレーションを実行するには、電機子巻線を EMWorks2D 巻線エディタ内で電流駆動モードに設定し、電流の大きさをゼロに設定する必要があります。シミュレーション時間と時間ステップは、可動子の変位が等しくなるように選択されます。ポールピッチの2倍に。他のパラメーターは、表 2 に示すようにリストされています。
表 2. 開回路シミュレーションの設定
| パラメータ | 価値 |
|---|---|
| シミュレーション時間 | 0.03秒 |
| 時間ステップ | 0.0005秒 |
| 速度 | 1メートル/秒 |
| 距離 | 30mm |
| 初期位置 | 0mm |
| 位相ごとの巻き数 | 280 |
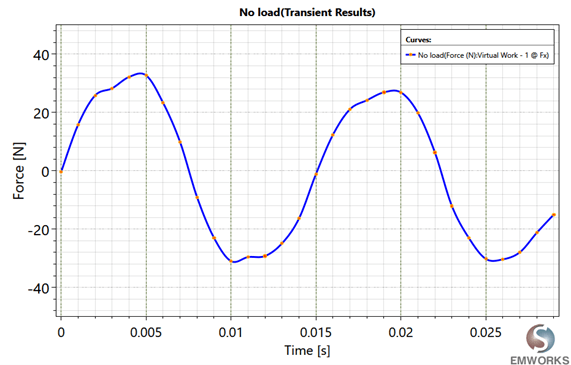
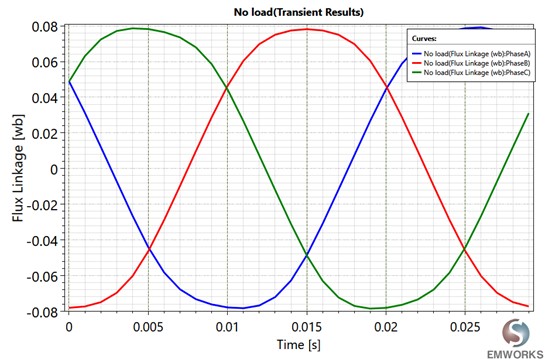
図5.磁束結合
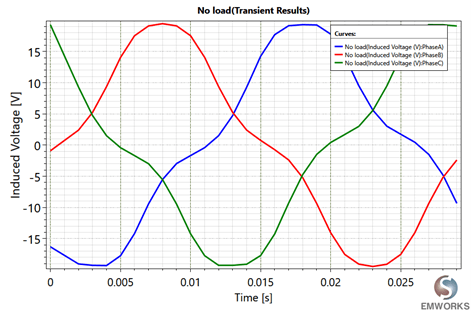
図 6. 誘導電圧
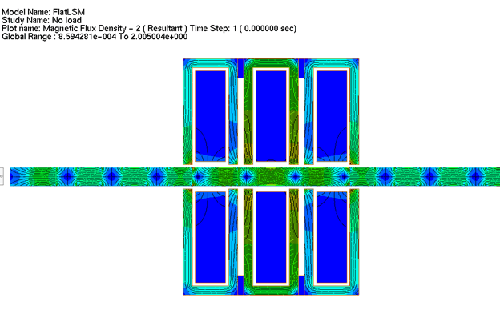
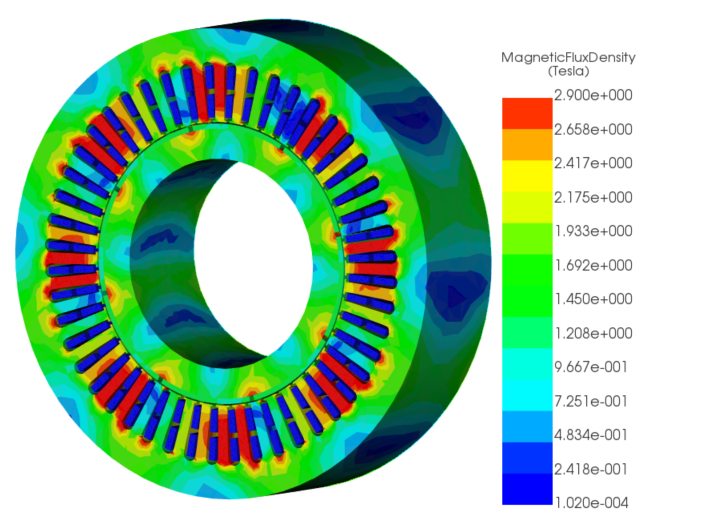
図 7. 磁束密度
2. FLSM(推力値)の負荷解析
負荷試験の場合、印加電流値は可動子の距離値 (x) に依存し、可動範囲は極ピッチ値 15 mm に設定され、ピーク電流値は 8 A、線速度は1 m/s に設定します。 3 相すべての電流方程式は次のとおりです。
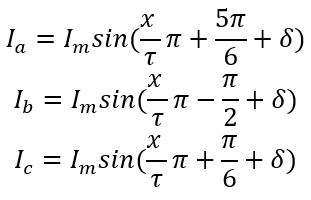
どこ![]() 最大推力を得るために、さまざまなシミュレーションが実行されました。
最大推力を得るために、さまざまなシミュレーションが実行されました。
![]()
線形速度は、式によると、周波数と極ピッチ値のみに依存します。
![]()
同様に、電流の値は 33Hz の周波数で得られます。
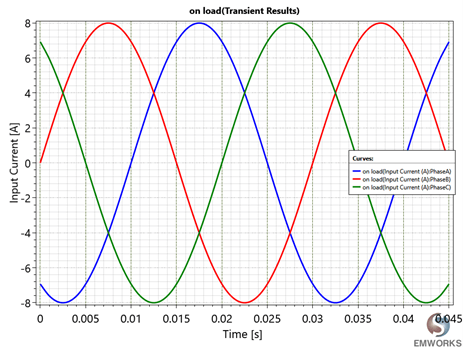
図 8. 入力電流対距離
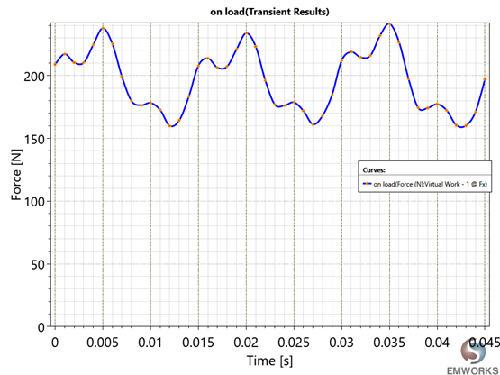
図9 推力
得られたシミュレーション結果を表 3 にまとめます。
表 3. シミュレーション結果
| パラメータ | 価値 |
|---|---|
| 最大力、f max | 241.34N |
| 最小力、f min | 160.01 N |
| 平均力、f av | 196.10 N |
| 力の結合係数、k r | 0.414 |
| 最大戻り止めコギング力 | 25.66N |
力の結合係数は次のように計算されます。
![]()
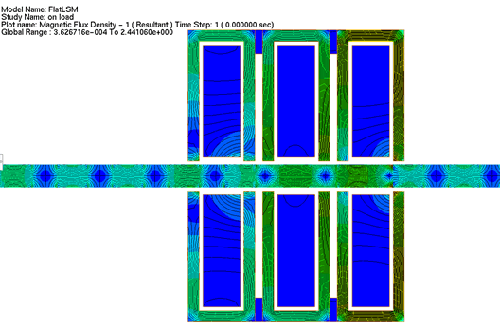
図 10. 負荷時の磁束密度プロット
3. FLSM の動的シミュレーション
FLSM 動的シミュレーション パラメータを表 4 に示します。電機子電流は負荷シミュレーションと同じであり、速度値は動的ニュートン方程式を使用して計算されます。
表 4. FLSM 動的シミュレーション パラメータ
| パラメータ | 価値 |
|---|---|
| 可動子質量(kg) | 1 |
| 減衰係数(Ns/m) | 0.001 |
| 初速度 (m/s) | 0 |
| 初期位置 (m) | 0 |
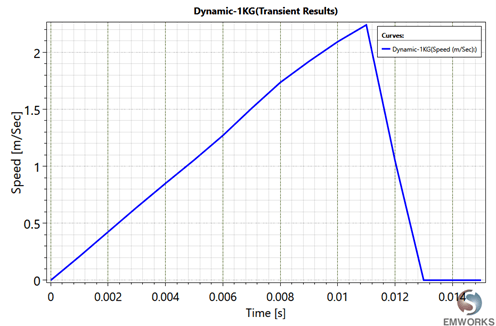
図 11. 動的速度
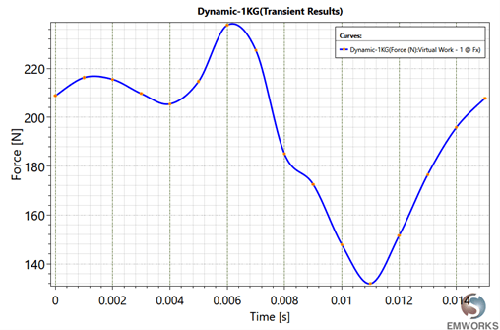
図 12. 動的力
得られたシミュレーション結果を表 5 にまとめます。
表 5. シミュレーション結果
| パラメータ | 価値 |
|---|---|
| 最大力、f max | 237N |
| 最小力、f min | 132N |
| 平均力、f av | 194.04 N |
| 力の結合係数、k r | 0.5411 |