磁気ギア
非接触での電力伝送を実現する磁気ギア(MG)が産業界の関心を集めています。従来の機械式ギアには、摩擦損失、潤滑の問題、熱、振動、騒音など、いくつかの弱点がありました。そのため、従来の機械式ギアの使用に伴う問題を克服するために、磁気ギアが開発されました。
それらは、潤滑とメンテナンス費を節約し、熱の問題を最小限に抑える摩擦のないエネルギー伝達を特徴としています。さらに、MG は、騒音と振動の伝達を低減する役割が認められており、ロボット工学、自動車、石油とガス、船舶推進などの多くの産業分野が、磁気ギアの高い効率と信頼性から恩恵を受けています。
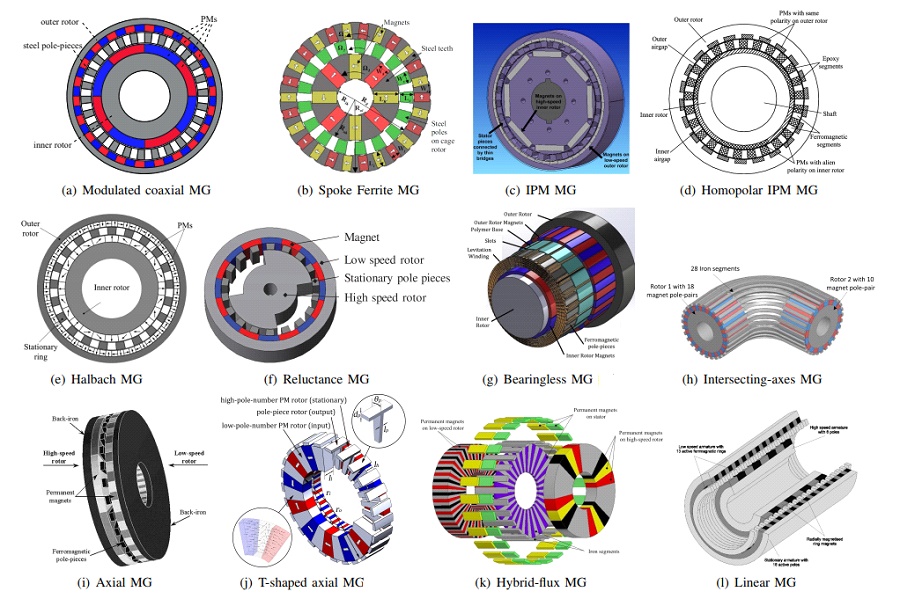
エンジニアは、高効率で高性能な磁気ギアの設計と開発に取り組んできました。図 1 では、さまざまなトポロジが提案されています。
CAD 設計と数値シミュレーションは、磁気ギア システムの設計と解析に役立ち、効率を向上させます。したがって、有限要素法 (FEM) は、その信頼性のおかげで、磁束密度、磁場強度、力、トルクなどの磁気結果を計算するために使用されます。
3D に加えて、2D FEM シミュレーションは、平面対称または回転対称を表す問題で使用されます。
この記事では、図 [2] で提案されている同軸磁気ギア システムについて検討します。モデルの形状は平面対称であるため、EMWorks2D と EMS を使用して 2D と 3D の両方のシミュレーションを連続して実行します。 2D トルクの結果は、公開されたデータと比較されます [2]。 2D と 3D の結果の比較は、この記事の最後で確立されます。
同軸磁気ギアの 2D FEM シミュレーション [2]
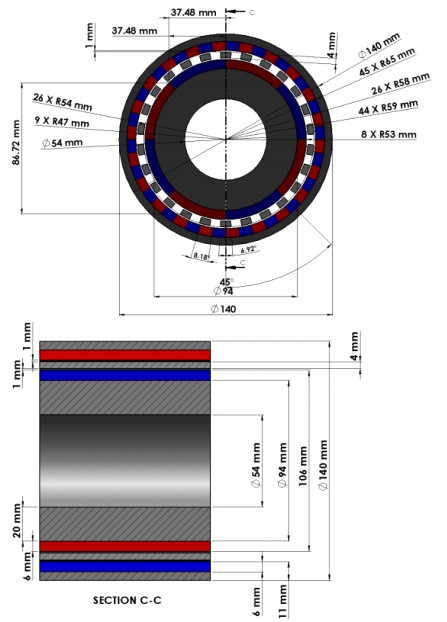
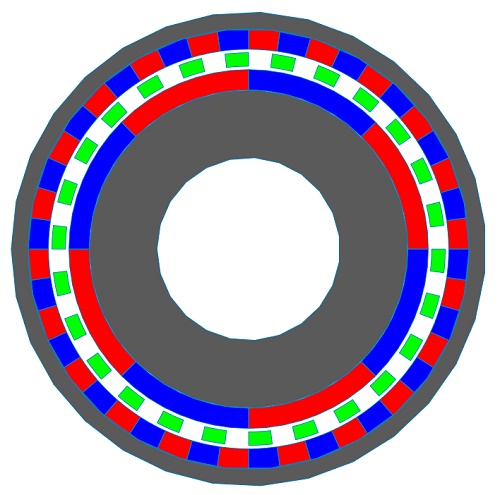
同軸磁気ギア モデルは [2] に示されています。提案された MG は、内側ロータに 4 つの極対、外側ロータに 22 の極対、および 26 の変調極片で構成されています。したがって、モデルのギア比はです。
インナーローターの回転速度は、アウターローターよりも高速です。低速ローターは、高速ローターよりも高いトルクを発生します。
エアギャップ領域の磁束と発生トルクは、EMWorks2D を使用して評価されます。
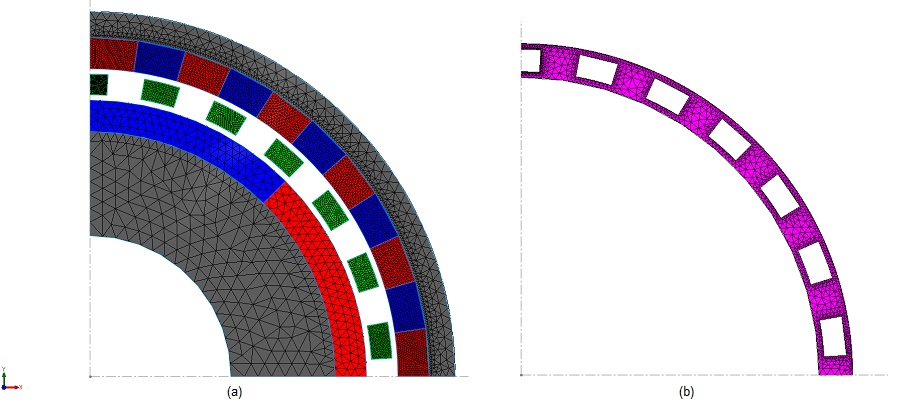
この分析では、渦効果と端部効果の両方が無視されます。図 2 に磁気歯車モデルの構造と寸法を示します。
パラメトリック静磁場シミュレーションは、EMWorks2D を使用して定義され、内側と外側の両方のローターの角度が変化します。図 3a) と 3b) は、モデル内のメッシュとエア ギャップを示しています。三角形のメッシュ要素は、EMWorks2D で自動的に生成されます。さらに、定義済みのサーフェス領域またはエッジで特定のメッシュ要素サイズを定義できます。
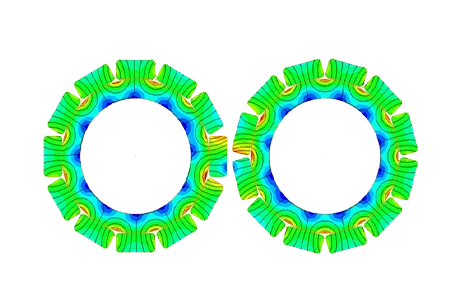
シミュレーション中、名ローターと外側ローターの角度は次の式で関連付けられます、。磁束密度のコンター、ベクトル、およびライン プロットを図 4a)、4b)、および 4c) に示します (
と
)、 それぞれ。磁場プロットは、強磁性片の高磁束スポットによって特徴付けられます。
磁力線とベクトル プロットの両方が、磁束の方向を特定して検証するのに役立ちます。図 5 と図 6 は、磁場強度のフリンジ プロットと磁気ベクトル ポテンシャルの等高線プロットを示しています。
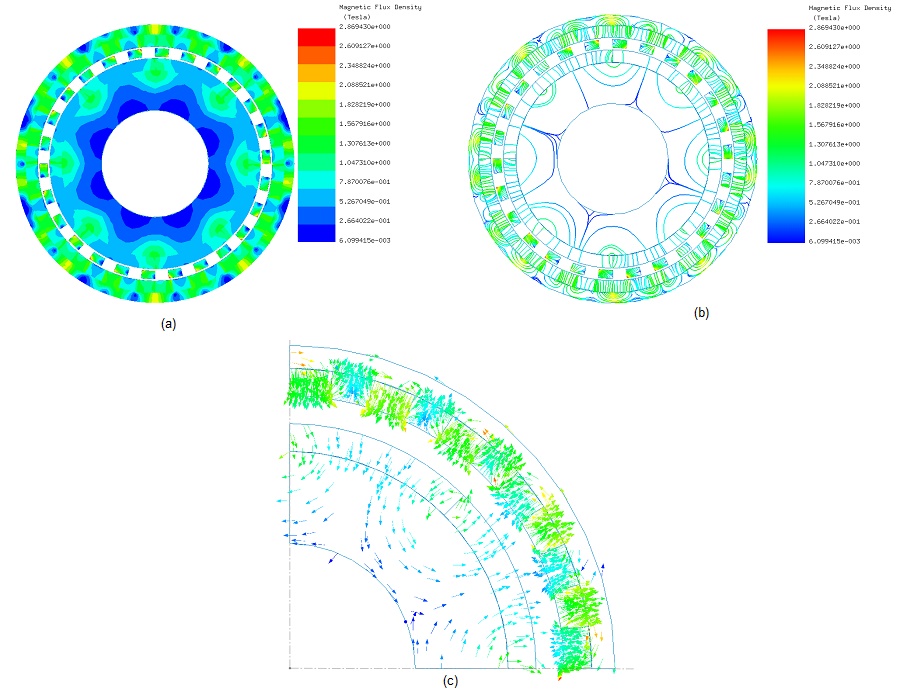
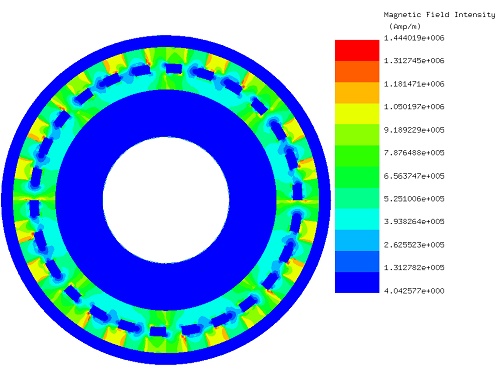
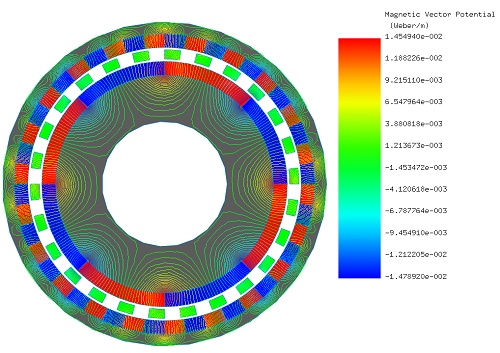
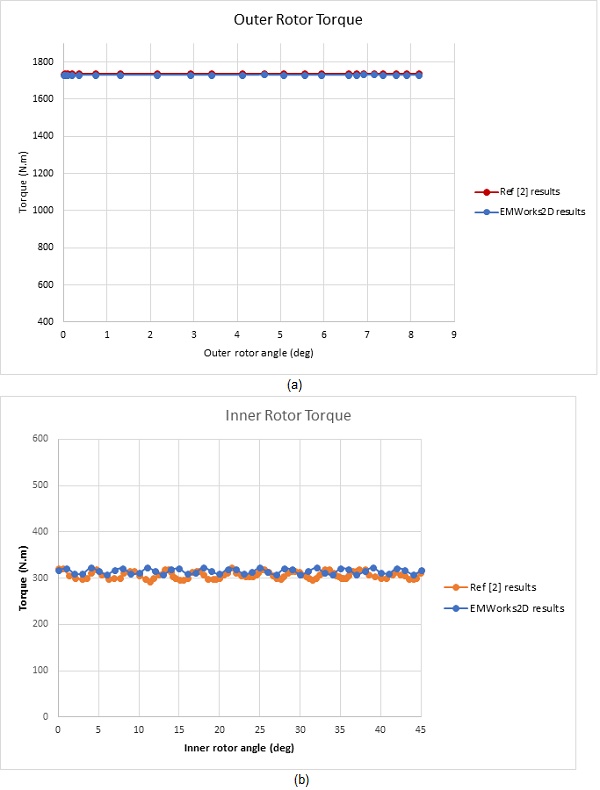
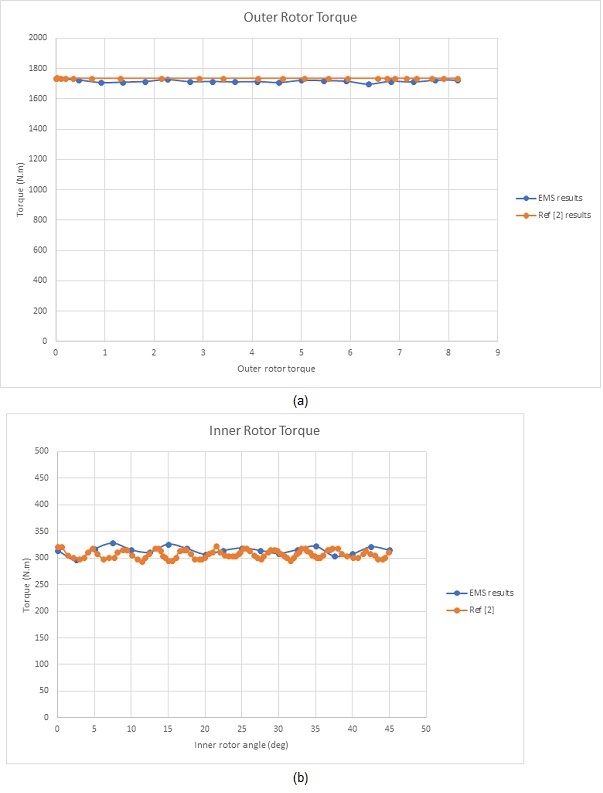
図 7a) と 7b) は、それぞれ外側ローターと内側ローターで発生したトルクの結果を示しています。前述のように、低速の外側ローターは、内側ローターよりも高いトルクを発生します。図 7a) のトルク曲線では、図 7b) のトルク曲線に比べて、外側ロータの極対数が多いため、リップルが少なくなっています。
初期角度位置では、外側ローターのトルクは約 1737 Nm ですが、内側ローターでは約 315 Nm です。したがって、この結果は内側ローターと外側ローターのギア比の関係を検証します。
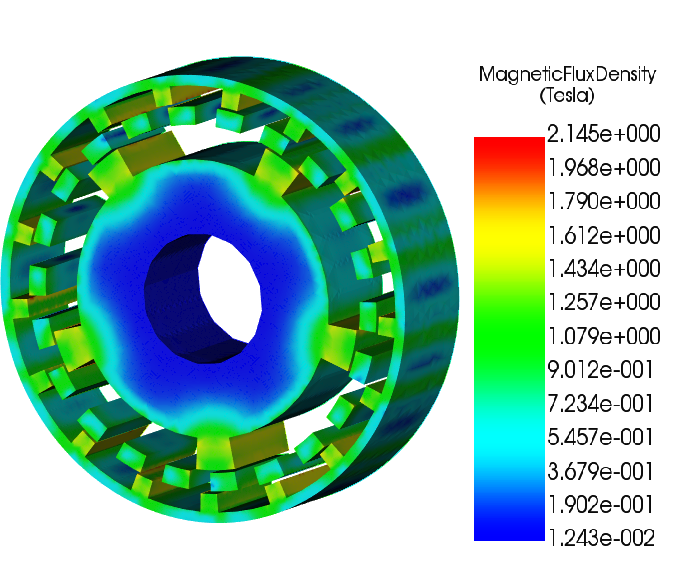
同軸磁気ギアの 3D FEM シミュレーション
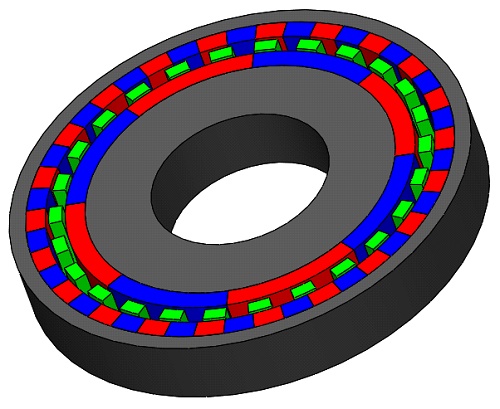
前のセクションで EMWorks2D を使用して調査した同じ提案された磁気ギア モデルを、同じモデル寸法を維持しながら、3D 電磁シミュレーション ソフトウェア EMS を使用して解析します。モデルは軸対称であるため、モデルの一部のみを実行することをお勧めします。この記事では、元のモデルの長さ 300 mm の代わりに 20 mm の磁気ギアをシミュレートし、計算時間を短縮します。図 8 は、SOLIDWORKS 内に構築された調査対象の形状の 3D モデルを示しています。
メッシュ化されたモデルを図 8 に示します。これは、正確な解が認められている四面体メッシュ要素でメッシュ化されています。図 9a) と 9b) には、磁束密度フリンジとベクトル プロットが連続して含まれています。
図 10 の磁束密度の等値面は内側ロータにプロットされ、図 11 は外側ロータの 2 つの極の間の線に沿った磁場のプロットを示しています。曲線は、モデルの中心に関して対称な形状をしています。したがって、曲線の半分だけが解釈されます。磁場は末端 (外側ローターの磁石表面) で最大になり、エア ギャップ ゾーンを通過するときに減少し、内側ローター磁石の 2 つのピークに達するまで増加します。最終的には、シャフト内で0に近づくまで再び減少します (現在のシミュレーションでは空気と見なされます)。
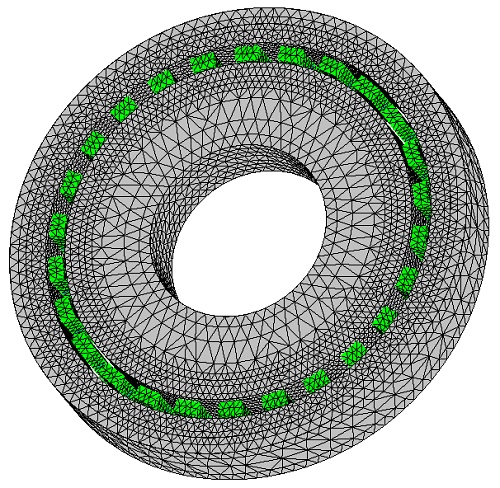
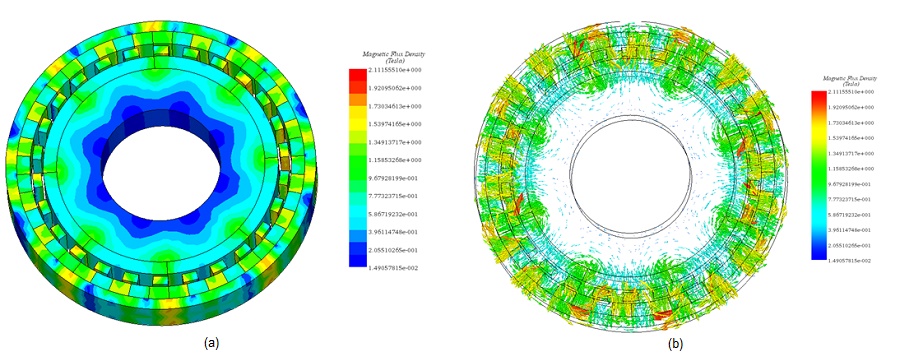
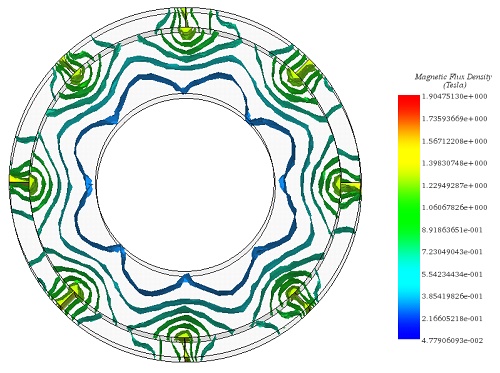
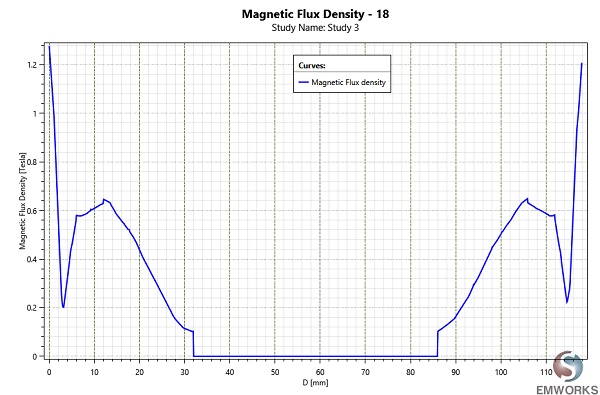
図 12a) と 12b) は、外側ローターと内側ローターの両方でのトルクの結果を示しています。 EMWorks2D によって計算された 2D 結果と同様に、低速トルクで生成されたトルクは約 1730 Nm ですが、高速ローターでは 310 Nm に達しました。
図 7 と 12 から結論付けられるように、2D シミュレーションの結果は、3D FEM ソフトウェア EMS で計算された結果を裏付けています。図 13 には、内側と外側の両方のローターの角度に対する磁束密度のアニメーション プロットが含まれています。内側ローターと外側ローターが逆方向に回転していることがわかります。
結論
磁気ギアシステムの使用は、さまざまな分野やアプリケーションで大幅に普及しています。ユーザーは、従来の機械式ギアと比較して多くの利点があるため、MG を好みます。さらに、数値シミュレーションは、革新的で堅牢で効率的な磁気ギアの設計と作成に貢献します。 2D FE 解析と 3D FE 解析の両方を初期段階で使用して、磁束密度、力、トルクなどの磁気結果を予測できます。このアプリケーション ノートでは、EMWorks2D と EMS の両方を使用して、さまざまなコンポーネントの磁束密度とトルクの結果を計算します。検討された磁気ギアのさまざまな構成として。最初のセクションでは、2D FE シミュレーションを確立して、内側ローターと外側ローターの両方のトルクとそれらの位置を評価しました。モデルで実行される 3D シミュレーションは、近似 2D ソリューションの使用を論理的に正当化する 2D 結果の精度を強調するようになりました。参考文献
[1]: Yawei Wang, Mattia Filippini, Nicola Bianchi, Piergiorgio Alotto. A Review on Magnetic Gears: Topologies, Computational Models and Design Aspects. Published in: 2018 XIII International Conference on Electrical Machines (ICEM), IEEE
[2]: Valentin Mateev, Iliana Marinova and Miglenna Todorova Department of Electrical Apparatus Technical University of Sofia, Bulgaria. Eddy current losses in permanent magnets of a coaxial magnetic gear. Published in: 2018 20th International Symposium on Electrical Apparatus and Technologies (SIELA), IEEE