BLDCモーターのCADモデリングとシミュレーション
本論文では、SOLIDWORKS と EMWorks2D をそれぞれ使用して BLDC モーターを作成し、シミュレートしました (図 1 を参照)。提案されたモデルは、参考[1]で検討されています。 BLDC モデルは、MotorWizard を使用して自動的に生成されます。 EMWorksが提供するモーターソフトウェアで、電動モーターの自動設計とシミュレーションの両方が可能です。 MotorWizard に加えて、EMWorks は、有限要素法 (FEM) を利用し、SOLIDWORKS 内に統合された 2D 電磁ソフトウェア (EMWorks2D) を提供します。
FEM シミュレーションは、複雑な電磁問題と形状を解析する高い能力を証明しています [1]。 1970年代から電気機械に適用されています。有限要素解析 (FEA) は、電気機械の形状、磁性材料の非線形挙動、およびモデル内の巻線分布を考慮する機能を提供することで、電気機械の研究と設計で直面する課題を克服するのに役立ちます。さらに、モデルにさまざまな境界条件を適用し、さまざまな種類の損失を計算できるため、FEA は有用なソリューションになります。
3D ソリューションは、2D シミュレーションには当てはまらない、巻き終わり効果、スキュー効果、局所効果などを考慮することで完全かつ正確な結果を保証できますが、より長い計算時間とより多くのコンピューター リソースを必要とします。したがって、複数のモデルと条件が調査される機械の設計プロセスまたは故障調査では、2D アプローチを使用する方が、計算時間が短く、許容できる結果が得られるため、より望ましいと言えます。これは、より効率的で革新的なモーターの開発を加速するのに役立ちます。
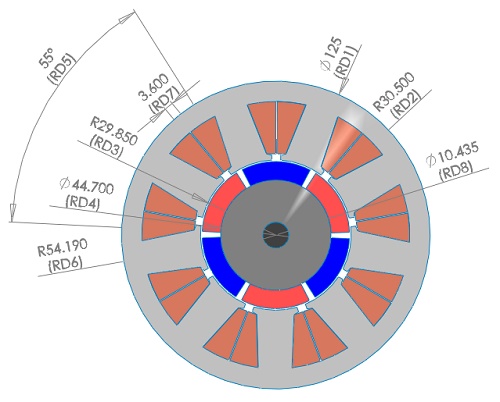
図 1 には、シミュレートされた BLDC モーターの 2D ジオメトリが含まれています。これは、12 スロットと 6 極の 3 相マシンで構成されています。したがって、このモーターの対称角は機械度。ステーターコアとローターコアはスチール製 (
)。表面実装構造のローターポールは、フェライト永久磁石で作られています(
)。シャフトは非磁性体です。
二重層巻線は、コイル ピッチが 1 に等しい 3 相に配置されます。各相の巻き数は 1456 です。
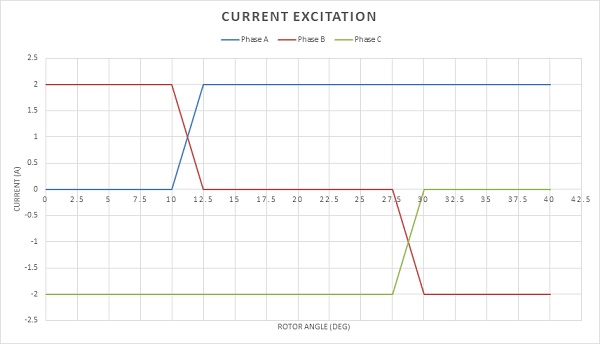
以下に各相の励磁信号を示します。 3 つの理想的な方形波電流で構成されています。三相巻線はYに接続されています。ただし、各位置では 2 つのフェーズのみが供給され、1 つのフェーズは励起されません。位相間のオンとオフの切り替えは、ローターの位置に依存し、回転の 360 電気角度ごとに繰り返されます。
このシミュレーションでは渦効果と鉄損が無視されているため、静磁気解析が実行されます。出力トルクと磁束の結果を計算するために、電流と回転子位置の両方のパラメトリック スイープ スタディが定義されます。さらに、インダクタンスと鎖交磁束の結果が生成されます。トルクの結果は、参照 [3] の結果と比較されます。
メッシュ化ステップ
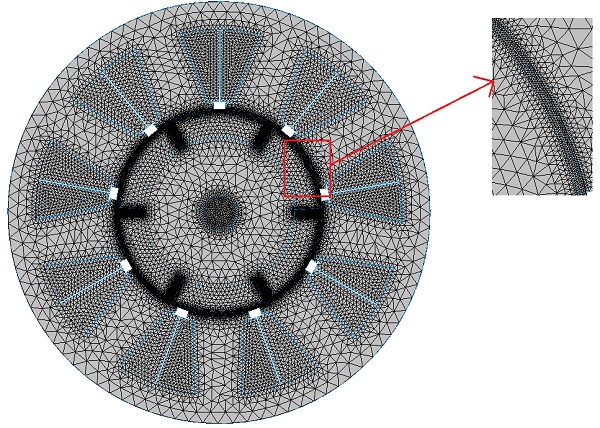
メッシュ生成プロセスは、FEM シミュレーションの非常に重要です。要素サイズが小さいほど、つまりメッシュ要素の数が多いほど、結果の精度が向上しますが、計算時間が長くなる可能性があります。 EMWorks2D には、柔軟で使いやすいメッシャーが付属しています。結果がメッシュに非常に敏感になる可能性がある特定のサーフェスとエッジにメッシュ調節を追加できます。図 3 はメッシュ調節がエア ギャップに適用されている間のメッシュ モデルを示しています。
結果と考察
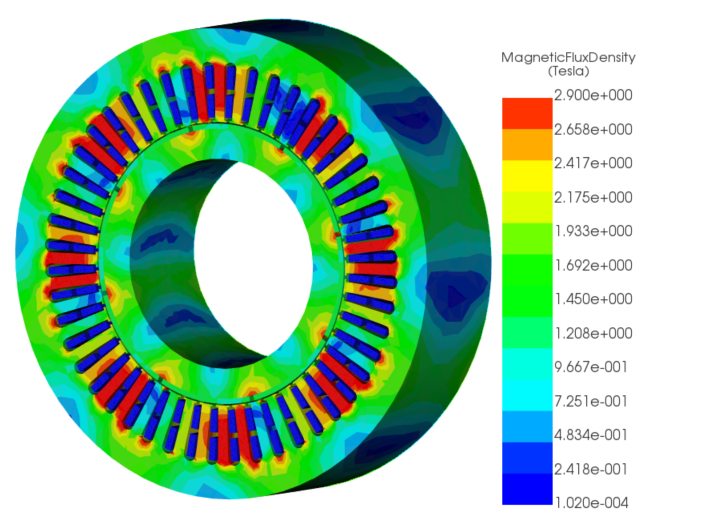
シミュレーションは異なるローター位置で実行され、結果が生成されます。図 4a) と 4b) は、初期位置 (0 度、コイル A は励磁されていない) でのマシン内部の磁束密度のフリンジとベクトル プロットをそれぞれ示しています。磁束密度は機械の中心から出入りします。これは、励磁された相 B と C の極性が反対であるためです。固定子ティースの角に高い磁束密度が見られる
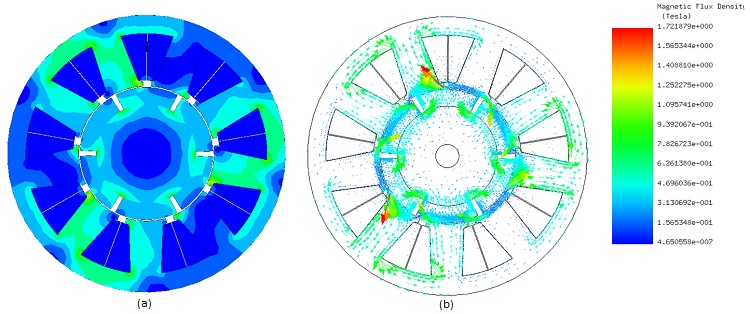
図 5 は、回転子角度に対する磁束線のアニメーション プロットを示しています。磁気ベクトル ポテンシャルの等高線が図 6 にプロットされています。これは、ほとんどの磁場がモーター内を循環していることを示しています。
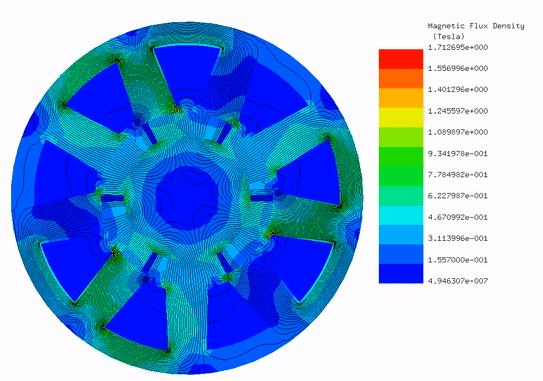
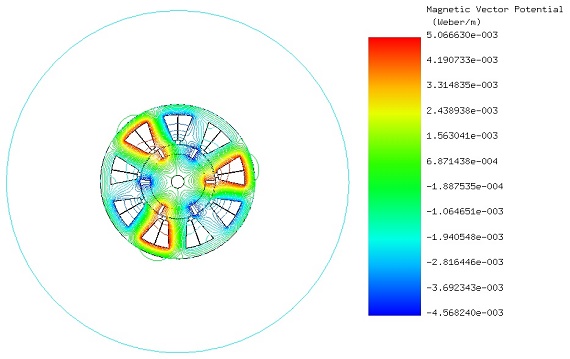
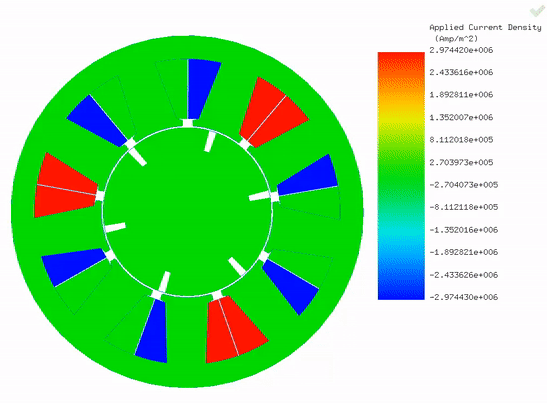
図 7 は、異なるローター位置で適用された電流密度のアニメーションを含んでいます。つまり、図 7 は、異なる回転子位置での 3 相の励磁を示しています。この転流により、可能な限り高いトルクを発生させ、トルクリップルを低減できます。
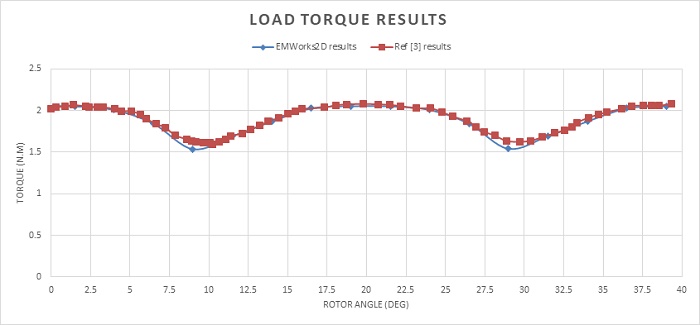
以下の図は、角度範囲に対して EMWorks2D によって計算された負荷トルクの結果を示しています。 に
[3] で提示された結果と比較します。トルク曲線は、リップルの振幅は小さいものの、リップルの数がかなり多い (1 回転で合計 18 個のリップル) という特徴があります。計算されたトルクの最大値と最小値は、それぞれ 2.05 Nm と 1.53 Nm です。発生した平均トルクは約 1.89 Nm です。
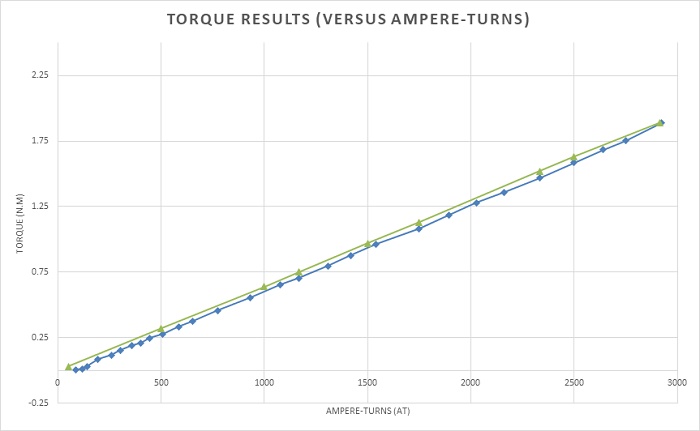
図 9 は、静的トルク曲線 (生成された平均トルク) とアンペア ターンを示しています。これは、トルクがアンペアターンに比例することを示しています。無励磁時のトルク値は約0.1Nm(コギングトルク)で、2916Atで平均1.89Nmにまで増加します。 BLDC によって生成される静的トルクの図 9 に示されているこの線形依存性は、ブラシ付き DC モーターの利点として考慮されます。したがって、整流子とブラシを使用しない BLDC への継承された利点です。
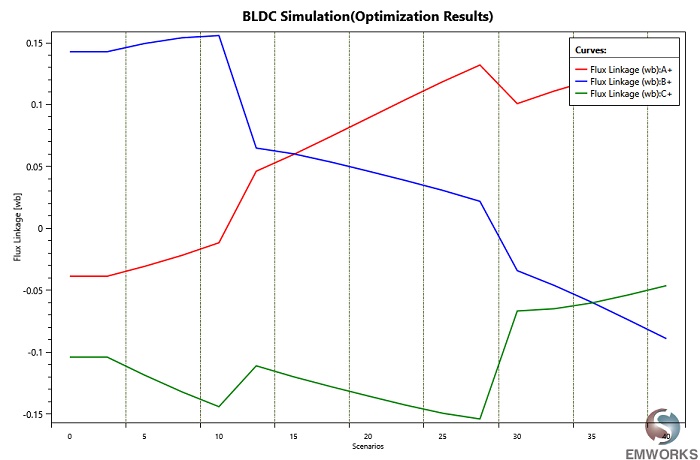
表 1 は、モーター相のインダクタンスの結果をまとめたものです。すべてのフェーズのインダクタンス値は同じです。三相巻線の鎖交磁束の結果を図 10 にプロットします。
| フェーズ A、B、C | |
| 自己インダクタンス (H) | 0.64085 |
| 相互インダクタンス (H) | 0.61795 |