ボイスコイルアクチュエータ
ローレンツ力の概念に基づくボイス コイル アクチュエータは、小さな変位に対して非常に正確な位置決めを実現する一種の直接駆動機構です。ボイスコイルは現在、幅広い用途に使用されています。非整流型 DC リニア アクチュエータとしても知られるボイス コイルは、制御が簡単で、高い加速度と速度を提供し、コンパクトで軽量な構造を示します。これらの利点により、非常に正確な位置決めが必要なアプリケーションで、従来の電気モーターを完全に置き換えることができます。 10nm から 100mm までのストロークで、ナノまたはマイクロ位置決めアプリケーションに高精度の変位を提供できます [1]。このリンクでは、ボイス コイル アクチュエータが優先される場合について詳しく説明しています - https://www.linearmotiontips.com/when-are-voice-coil-actuators-best-linear-motion-option/

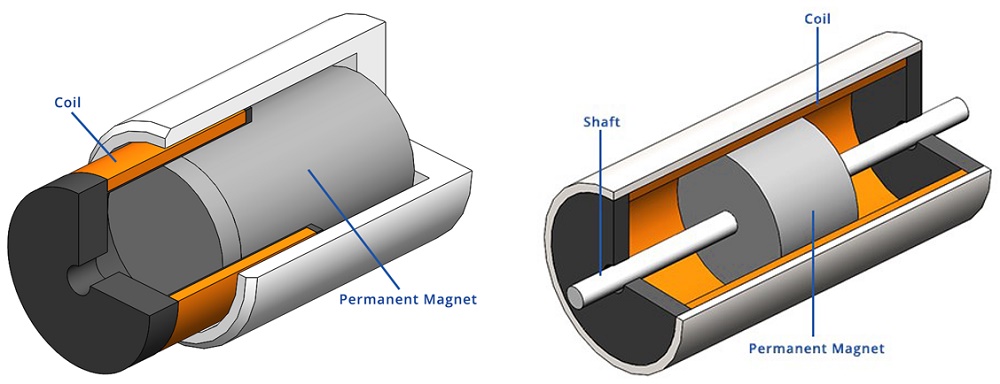
ボイスコイルアクチュエータは、主に永久磁石と撚りコイル巻線で構成されています。アクチュエータの効率を向上させるために、追加の強磁性コンポーネントを追加することができます。ボイス コイル アクチュエータでは、可動コンポーネントはコイルまたは永久磁石です。図 2 と図 3 は、ボイス コイル アクチュエータの 2 つの構成を示しています。それぞれ可動コイルと可動永久磁石です。 VCA 内部で機械運動に変換される電気エネルギーは、ローレンツ力の原理に従います。このメカニズムは、次の物理法則 (ローレンツ力) によって支配されます。導体に電流が流れていて、磁場内に置かれている場合、直交する電磁力がこの導体に生成されます。力の方向は、導体電流の極性を逆にすることで反転できます。
計算されたローレンツ力は、次の式を使用して計算されます。 ここで、J は導体内を流れる電流密度、B は磁場です。
ボイスコイルアクチュエータは多くのアプリケーションで採用されています。これらは、ポータブル人工呼吸器、計量および投薬用のポンプなどの医療業界で採用されています。非常に高い変位分解能を必要とする半導体や電子機器などの他の主要産業では、製品の取り付け、組み立て、およびテストにボイスコイルアクチュエータが使用されています。可動コイルの慣性が小さいため、スマートフォンのカメラやその他の小型アプリケーションのオート フォーカス モーター アクチュエーターとしても好まれています。
ボイスコイルアクチュエータ対ソレノイドアクチュエータ
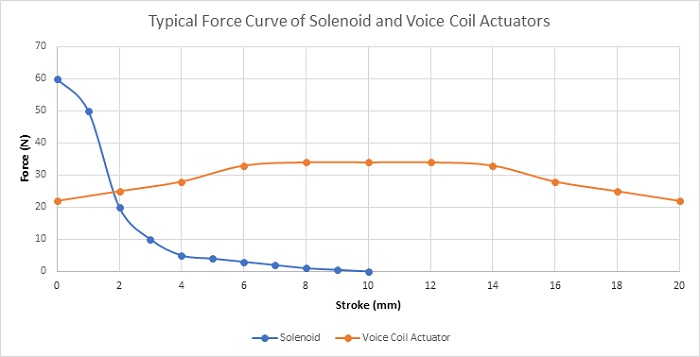
下の表と図 3 は、ボイス コイルとソレノイド アクチュエータの主な特性と生成される力の典型的な動作を比較したものです。ソレノイドは限られたストローク範囲でより高い力密度を生成し、ボイスコイルアクチュエータは広いストローク範囲で低いが一定の力を生成できます。さらに、ボイスコイルアクチュエータは、より堅牢で制御可能な力を提供します。
| ボイスコイルアクチュエータ | ソレノイドアクチュエータ | |
| ストローク | 5インチまで | ¼インチ |
| 力 | 低い | 高い |
| 一定力 | はい | いいえ |
| 可逆 | はい | いいえ |
| 位置・力制御 | はい | いいえ |
| 料金 | 適度 | 低い |
問題の説明
この記事では、ボイス コイル アクチュエータについて説明します [3]。 [3] で決定された最適なアクチュエータ パラメーターを使用して、一連のシミュレーションが実行されます。最初のセクションでは、静的解析を使用して、コイルのローレンツ力と電流およびアクチュエータ位置の両方を計算します。後で過渡磁気スタディを使用して、さまざまな DC 電圧励起での電流を計算します。シミュレーション結果は、[3] で公開されている実験データと比較されます。最後に電気力学シミュレーションを使用して、アクチュエータの線形変位、速度、加速度などの機械的出力データを計算します。ボイスコイルアクチュエータの温度変化は、EMSによる電熱分析を使用して研究されます。
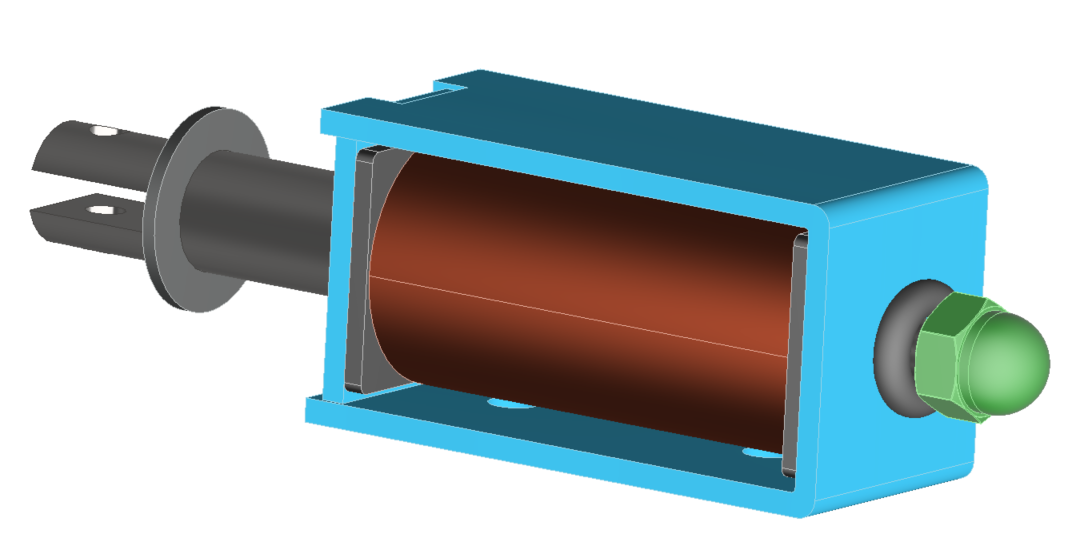
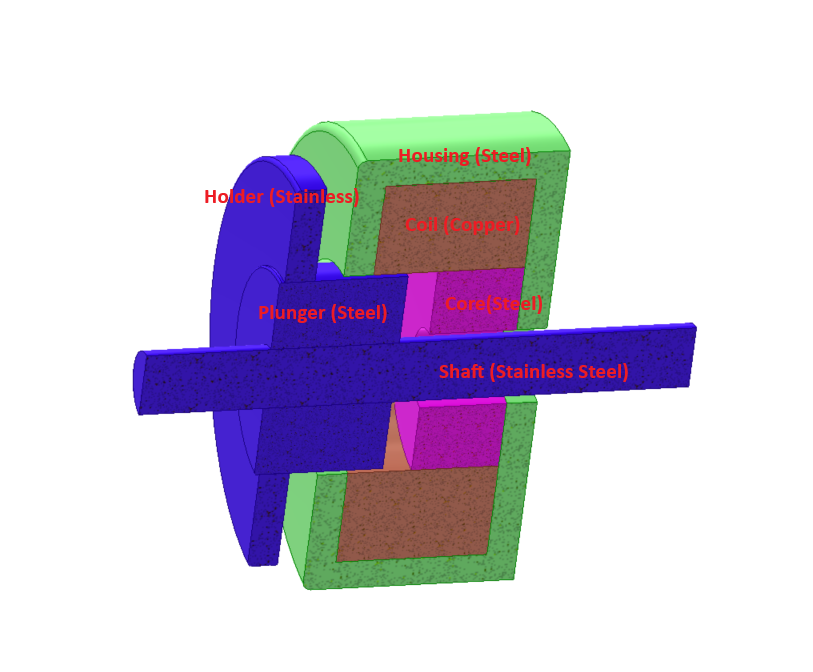
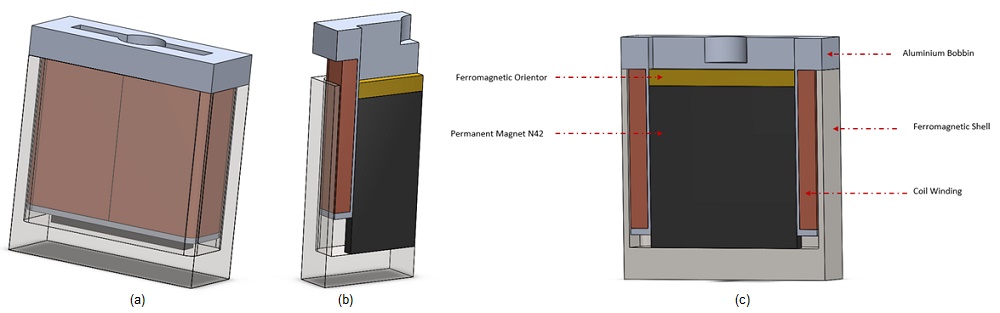
EMS、SOLIDWORKS、および SOLIDWORKS モーションを使用して、検討対象のボイス コイル アクチュエータのさまざまなシミュレーションを実行します。図 4a)、4b)、4c) は、検討したボイス コイル デバイスの全体図と断面図を示しています。 760巻きの銅製のより線コイルは、強磁性シェルと永久磁石の間に作成されたエアギャップ ゾーンに沿って軸方向に自由に移動します。固定され軸方向に磁化されたネオジム永久磁石 N42 は、2 番目のエネルギー源です。オリエンターとシェルの両方が、高い透過性を特徴とする軟鉄でできています。フラックスオリエンターは、フィールドをガイドし、磁気回路経路を改善するために使用されます。コイルを支持するためにボビンが挿入されます。
シミュレーションと結果
静解析 - 形状パラメトリック スイープ
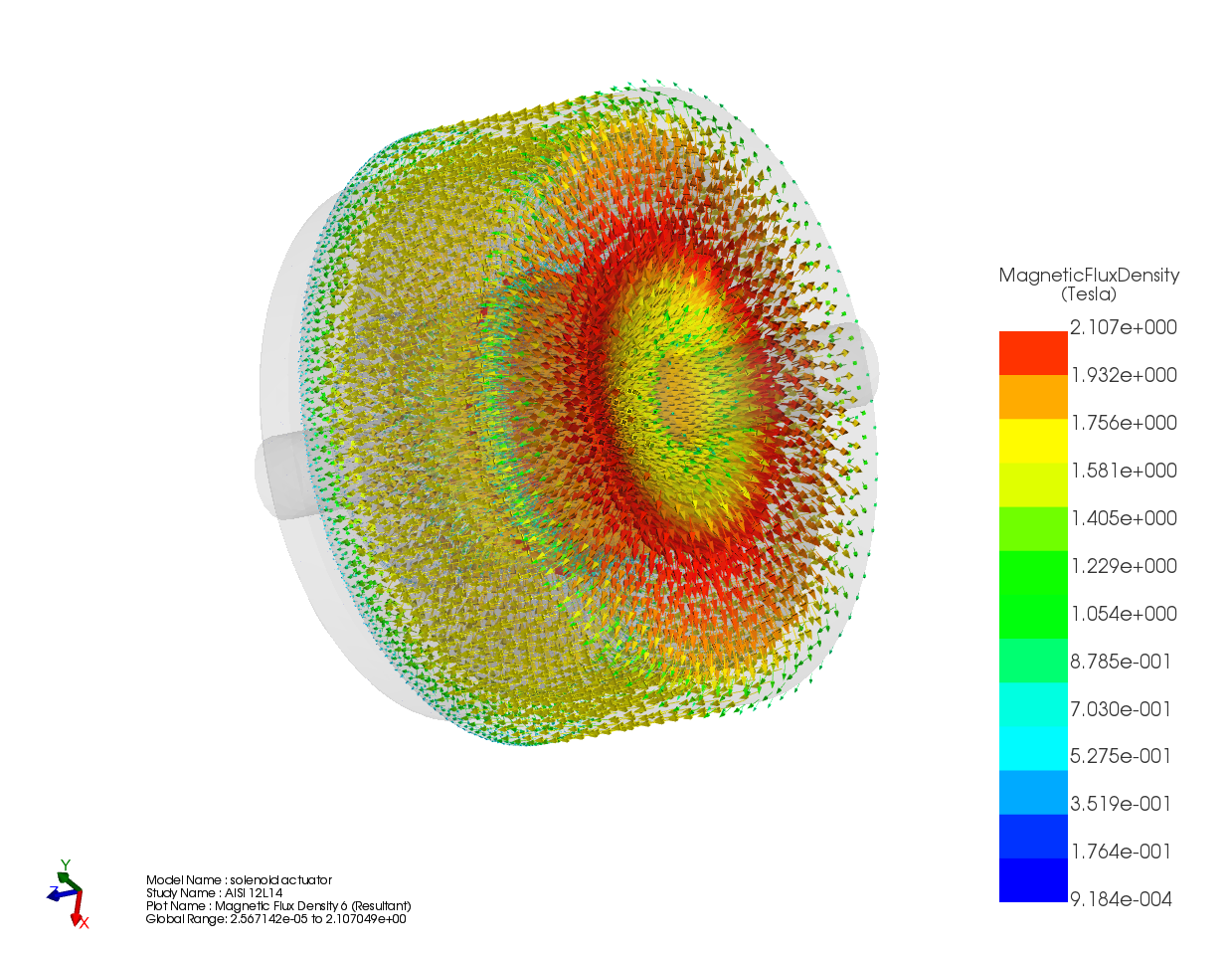
最初のシミュレーションは、可動部品 (コイルとボビン) の位置を変更しながら、さまざまな DC 電流レートで実行されます。パラメトリック スイープ スタディは、磁束、ローレンツ力、コイル パラメータなどを計算するために定義されます。図 5a) と 5b) は、印加電流が + 10A で位置が組立コイルとボビンの差は10mmです。磁束の平均は約 [1.3T,1.74T] です。磁場ベクトル プロットの正面断面図と側面断面図を図 6a) と 6b) に示します。コイルの電流密度は 1e8A/m^2 です。
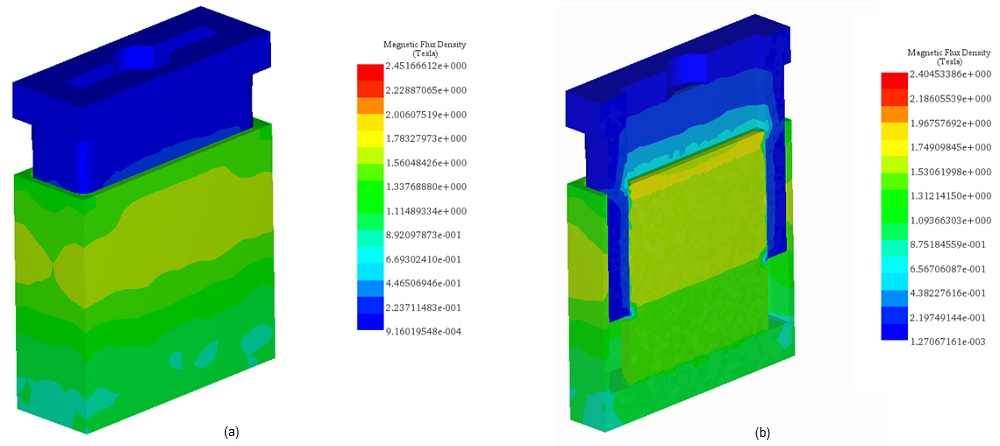
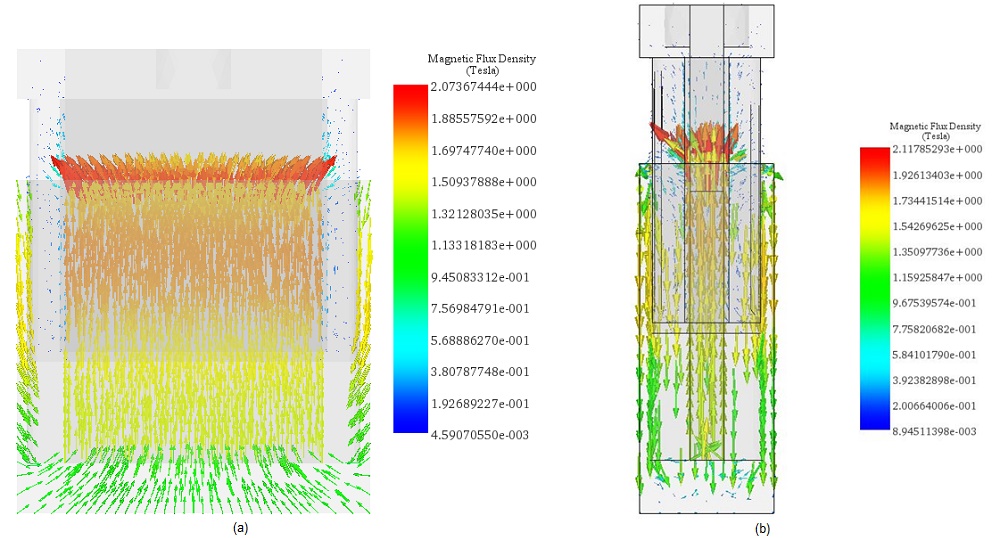
図 7 は、さまざまな DC 電流とストローク値の両方で計算されたローレンツ力の実験結果 [3] とシミュレーション結果を示しています。 10mmの位置で-10Aの電流で最大の力(約33N)が発生します。 4 ~ 16 mm のストロークで測定された力の値は、さまざまな印加電流率に対して一定であると見なすことができます。より大きなストロークで一定の力率は、より高い加速度を得るのに役立ちます。図 8 には、さまざまな電流に対する力のピーク値のプロットが含まれています。これは、力が電流と比例線形関係にあることを示しています。これは、アクチュエータの力密度の単純で柔軟な制御を示すことができます。
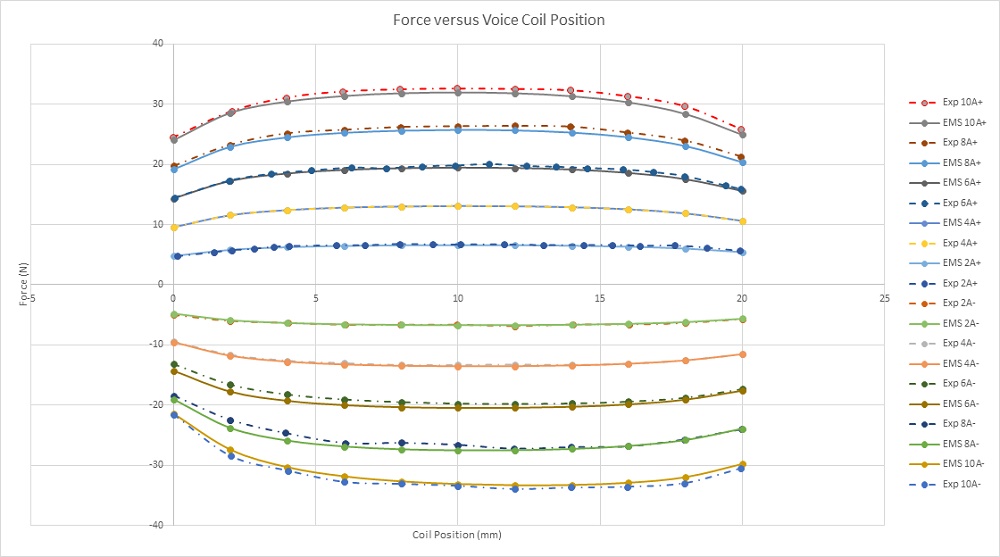
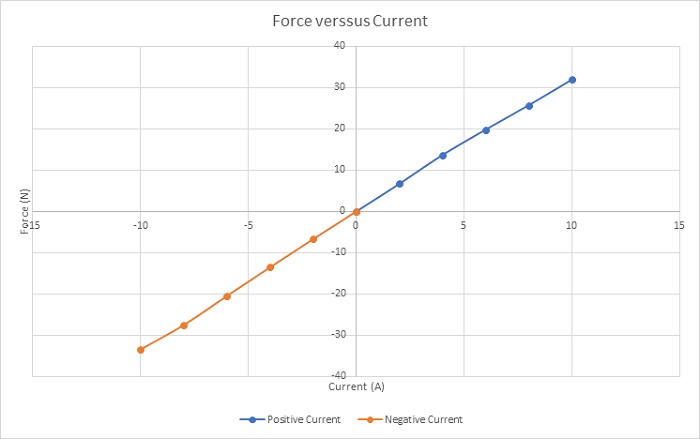
図 9 は、ストロークに沿ったさまざまな入力電流に対する力感度パラメーターを示しています。このパラメータは電流に関して一定であり、コイルの位置のみに依存します。力感度パラメーターのシミュレートされた平均値 (EMS によって計算) は約 3.2N/amp であり、これは実験で測定された値 (Exp 3.1N/amp) に近い値です。
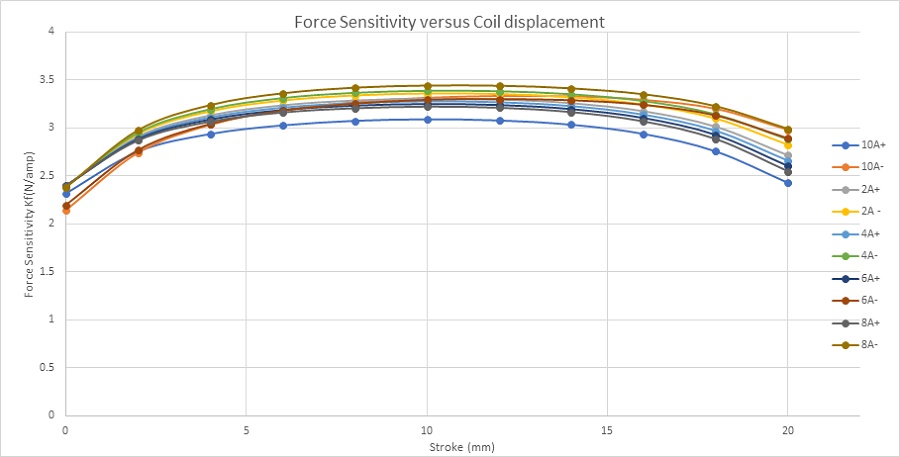
図 10 は、コイル変位に対するインダクタンス曲線を示しています。インダクタンスは 0mm の 5mH から 20mm の 4.48mH に減少します。変動は無視でき、コイルのインダクタンスはストロークに沿って一定であると見なすことができます。
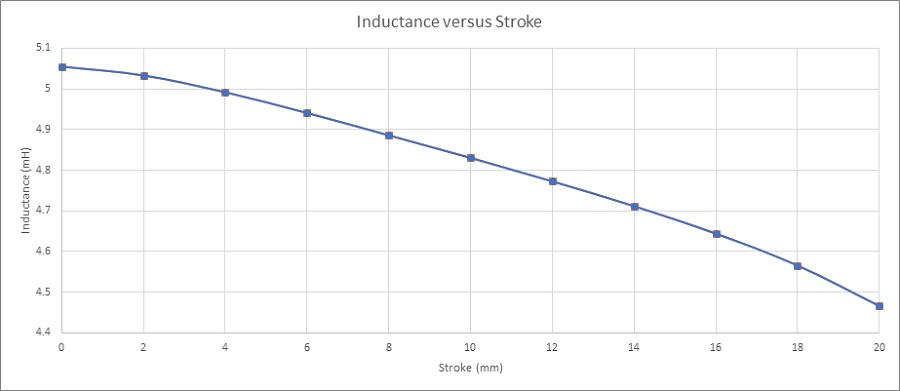
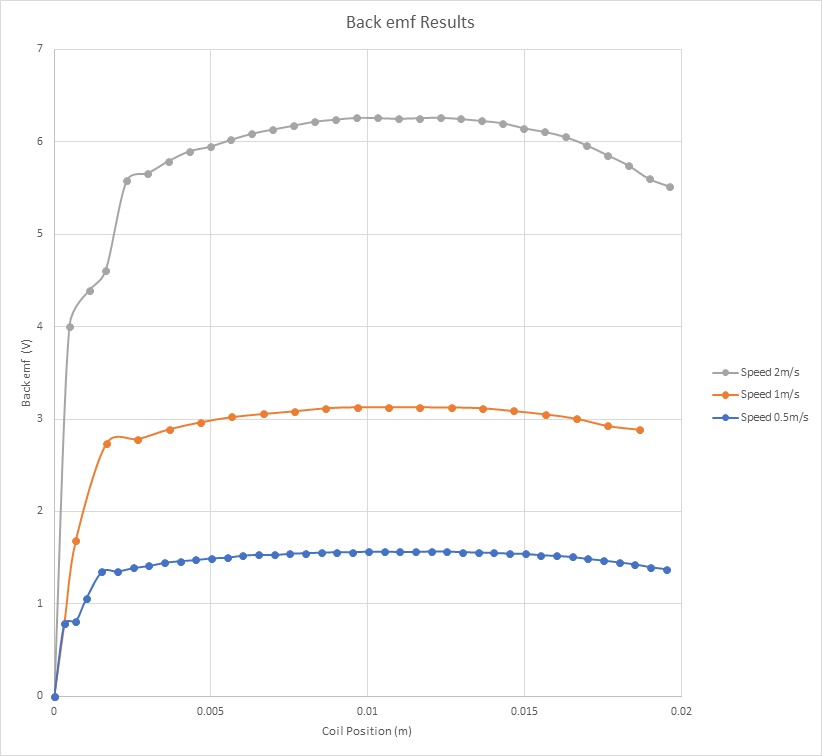
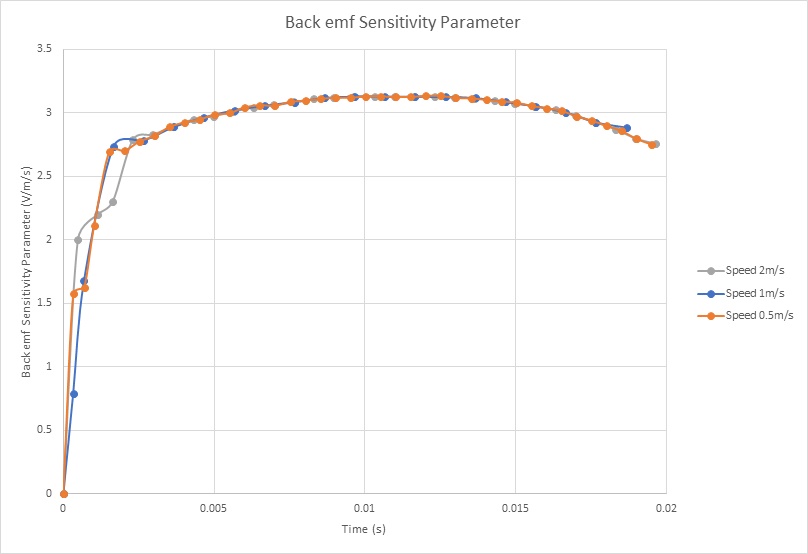
図 11 は、さまざまな速度に対するコイルの逆起電力の結果と、可動コンポーネントの重心に対する結果を示しています。逆起電力が速度とともに増加することを示しています。 2m/s の速度で、6.25V のピークに達します。図 12 には、計算された逆起電力感度パラメーター (V/速度) 対コイル位置が含まれています。これは速度定数パラメータです。つまり、コイルの速度によって変化しません。平均すると 3.1 V/m/s になります。
| EMS | 実験 | |
| 電流 | +10A | +10A |
| 抵抗 | 20.35 | 20.5 |
| インダクタンス | 5mH | 5mH |
| 最大発生力 | 34N | 33.4N |
| 力感度パラメータ | 3.2N/アンペア | 3.1N/アンペア |
| 逆起電力感度パラメータ | 3.1V/m/秒 | 3.1V/m/秒 |
EMS を使用した過渡シミュレーション – さまざまな電圧に対する電流と力の計算
このセクションでは、EMS の 過渡モジュールを使用して電磁シミュレーションを実行します。コイルには、さまざまな DC 電圧が供給されます。磁場、電流、ローレンツ力が計算されます。図13に定常状態時の磁束密度を示します。
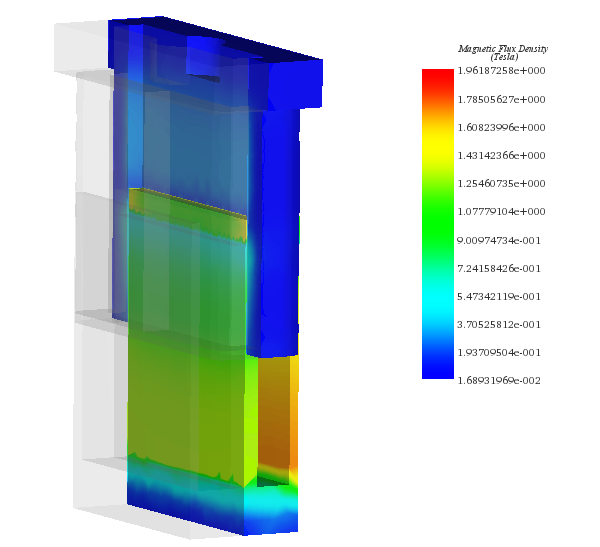
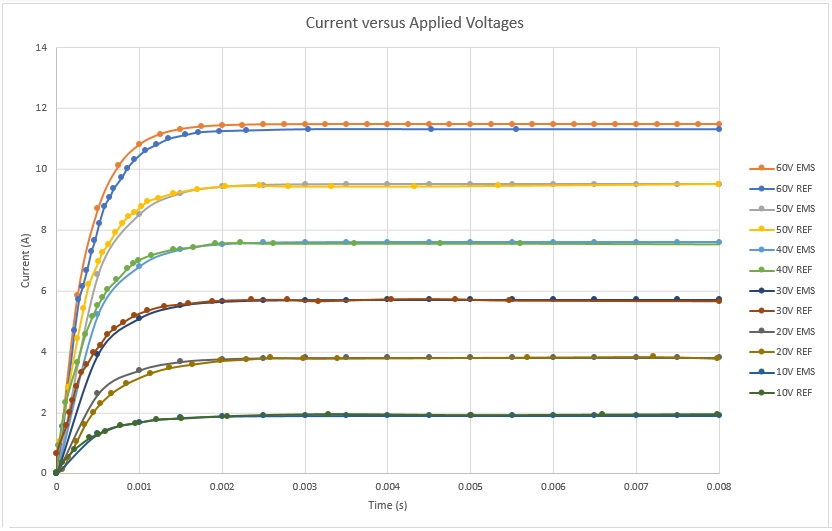
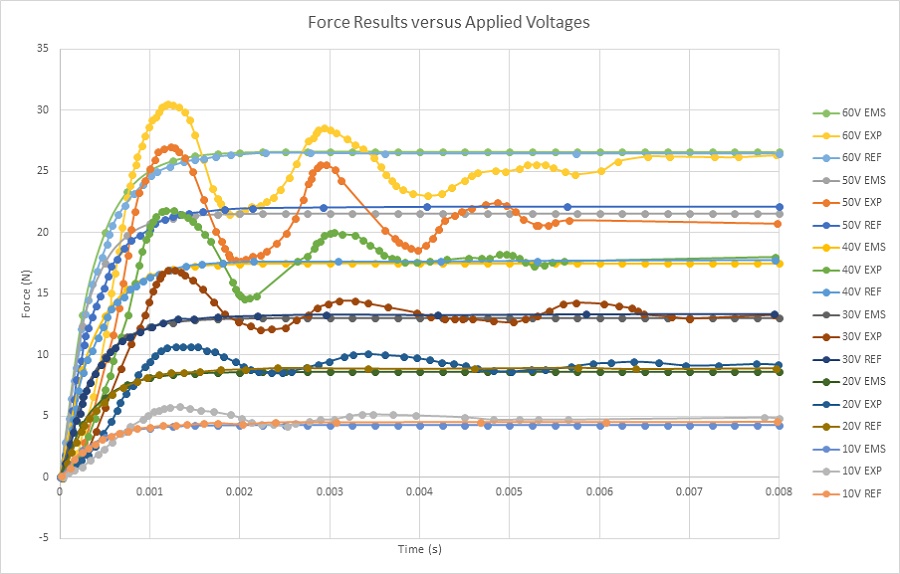
図 14 は、異なる印加電圧率に対する計算された電流応答を示しています。 2msで定常状態に達していることがわかります。これは、システムの時間応答を改善するのに役立ちます。計算された電流は、撚り線コイルにそれぞれ 10V と 60V が印加されたときに 2A と 11A です。図 15 には、同じ静止位置 (12mm) での力の結果のいくつかのプロットが含まれています。実験的テストによって測定された力のプロットされた曲線には、定常状態に達する前の振動がほとんど含まれていません。直流電圧10V印加時は4.5N、直流電圧60V印加時は26Nの力が得られます。電圧が高いほど、力は大きくなります。
SOLIDWORKSモーションに連成されたEMSを使用した電気機械シミュレーション – コイルの変位、速度、加速度、および電流の計算
このセクションでは、電気力学シミュレーションを確立して、磁場、電流、コイル位置、速度、加速度などを含む電気機械結果を計算および生成します。運動によって生じる渦電流効果は無視されます。これらのシミュレーションの実行には、SOLIDWORKS モーション解析に連成された EMS が使用されます。図 16a) には、20ms および 20V での磁束密度のプロットが含まれています。最大磁場 (1.77T) が鉄製シェルの薄い壁にあることを示しています。 20ms では、コイルの電流と位置はそれぞれ 0.88A と 4.78mm です。図 16b) は、9ms および 200V での磁束のプロットを示しています。磁束のピーク値は約 2T で、鉄のシェルに達します。この瞬間、コイルは 8.6 mm の位置に到達し、電流は 9.26A になります。磁場アニメーションを図 17a) および 17b) に示します。
-in%20case-of-20V-b)in-case-of-200V.jpg)
%20.gif)
(a)
.gif)
(ロ)
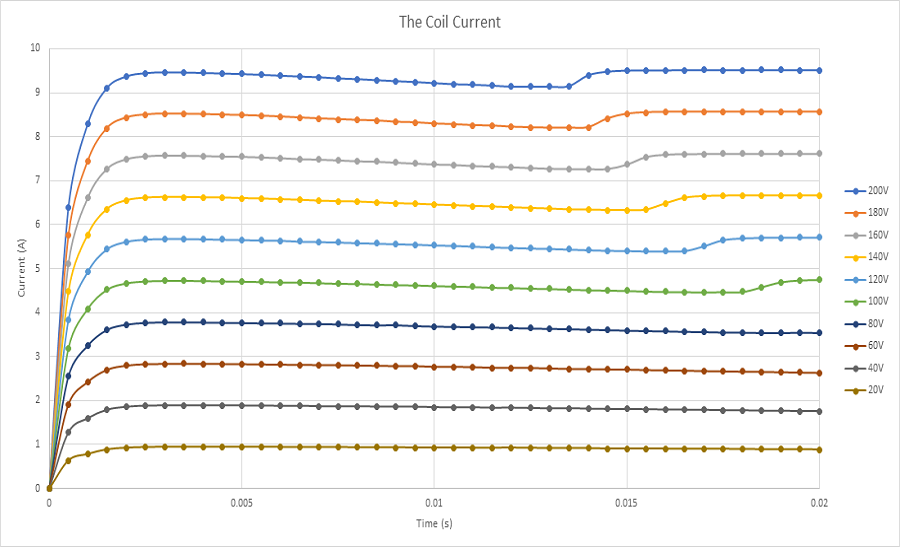
図 18 a) と 18b) と 18c) は、異なる印加電圧に対するコイルの線形変位、速度、および加速度の結果を示しています。 DC 電圧が 20V の場合、ボイス コイル アクチュエータは 0 秒で 0 mm から 20 ミリ秒で 4.7 mm 移動します。コイルの最大到達速度は約 0.5 m/s で、加速度は約 30 m/s^2 です。 200V DC 電圧がアクチュエータに印加されると、可動コイルは 13ms で 0 mm から 20 mm になります。これにより、最大速度と加速度はそれぞれ 3.3 m/s と 308 m/s^2 になります。電圧が高いほど、速度が速くなります。これは、図 19 で説明できます。ローレンツ力は、印加電圧に正比例する電流とともに増加します。供給電圧がそれぞれ 200V と 20V の場合、コイルの計算された電流は 9.5A と 0.9A です。
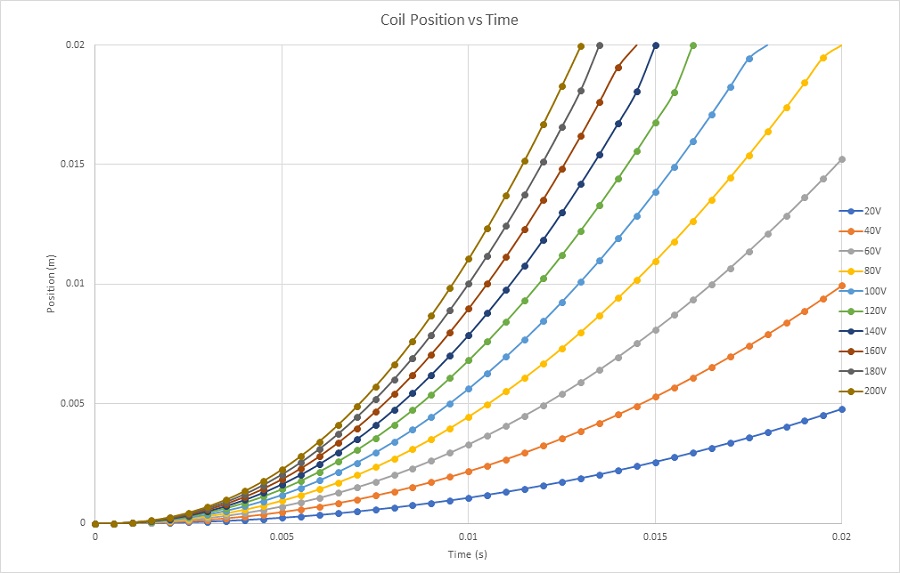
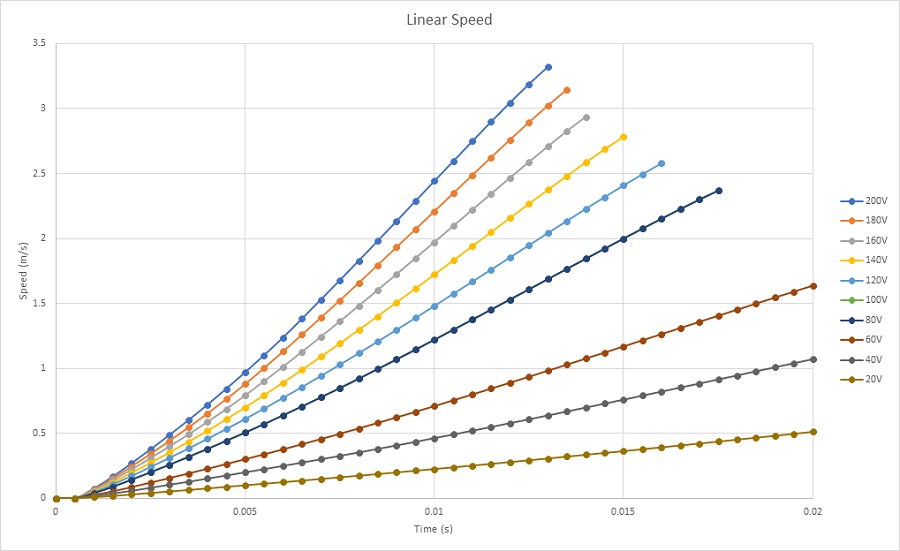
図 18b -コイル速度
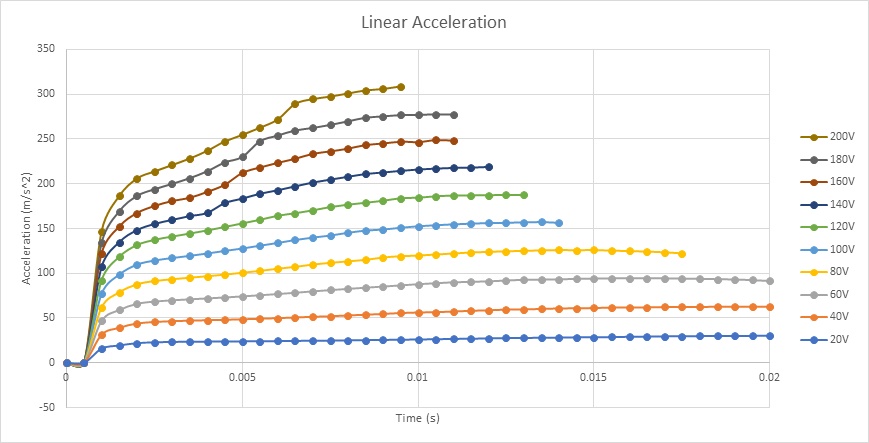
図 18c -コイルの加速
電熱解析 – ボイスコイルアクチュエータの巻線損失と温度計算
この分析では、ボイス コイル アクチュエータで発生する電磁損失と温度に焦点を当てます。渦効果が無視されるため、このアクチュエータでは銅損 (巻線損) が主な電磁損失になります。ジュールの法則により、巻線導体に電流が流れると、ジュール熱と呼ばれる熱が発生します。したがって、音声アクチュエータの温度は、印加電圧に比例して急速に上昇します。
EMS を使用して過渡電熱解析を実行し、コイルの静的位置への時間に対する巻線損失と温度変化を計算します。 EMS では、エクスポート/インポート データなしで熱結合解析が可能です。電磁気時定数は熱時定数に比べて小さすぎます。つまり、電磁気解の定常状態は非常に短い時間で達成されますが、熱解析の定常状態領域の達成には非常に長い時間がかかります。したがって、解析を高速化するには、異なるシミュレーション終了時間/時間ステップ サイズを使用する必要があります。
図 20 は、2 つの異なる電圧に対する巻線損失の結果を示しています。ボイスコイルの銅損は、DC 200V と 20V を印加したとき、それぞれ約 800W と 8W です。
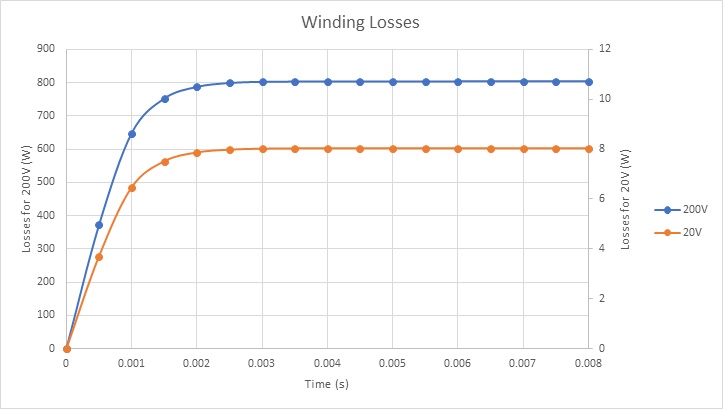
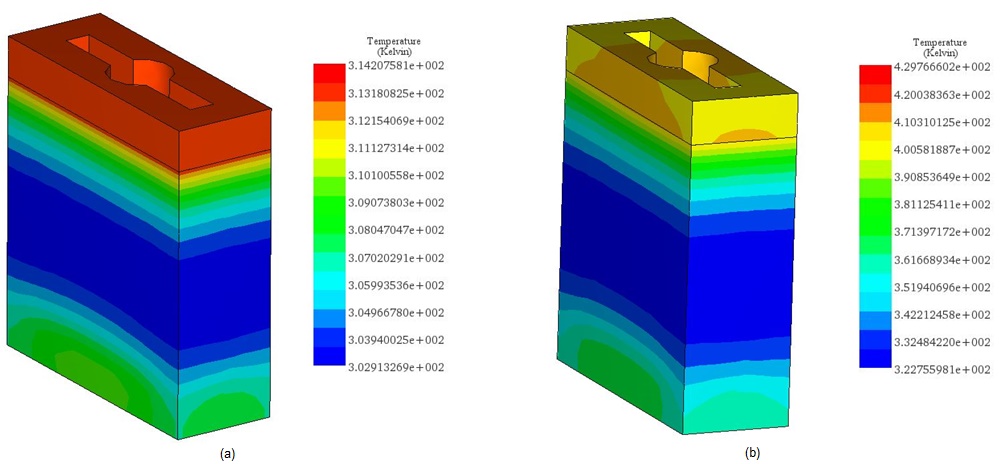
図 21a) と 21b) は、それぞれ 20V と 200V のボイス コイル アクチュエータの最終温度を示しています。銅損によりコイル内部に温度が発生し、伝導と対流により系全体に伝播します。
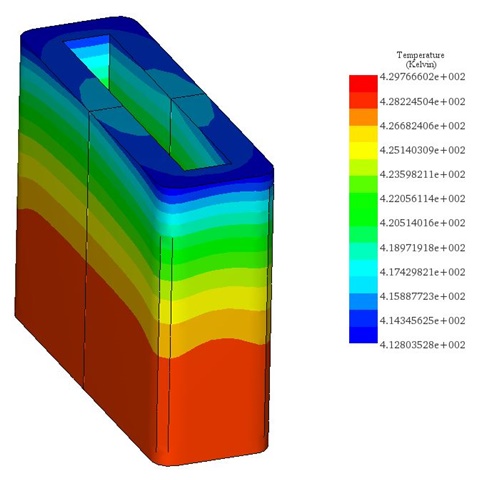
周囲温度 300 K から 5 秒で 429 K まで上昇し、20 V の場合、60 秒後に 314 K のピーク値に達します。図 22 は、5 秒で 200V の場合の温度結果を示しています。この場合、コイルが熱源であることが確認できます。システム全体の温度変化を図 23 に示します。
結論
このアプリケーションで検討されたボイス コイル アクチュエータは、ストロークに沿った一定の力、高速および加速など、多くの利点を示しました。コンピューター シミュレーションの結果は、実験およびテスト データと非常によく一致していることを示しています。これにより、効率が向上し、コストが削減された革新的なボイスコイルアクチュエータを作成および構築できます。
参考文献
[1]: https://www.linearmotiontips.com/when-are-voice-coil-actuators-best-linear-motion-option/
[2]: https://www.machinedesign.com/mechanical-motion-systems/article/21836669/what-is-a-voice-coil-actuator
[3]: Vahid Mashatan. Design and Development of an Actuation System for the Synchronized Segmentally Interchanging Pulley Transmission System (SSIPTS). Department of Mechanical and Industrial Engineering University of Toronto 2013