磁気ギア
ギアとギアボックスは、いくつかのアプリケーションで速度とトルクの伝達を変えるために使用されます。これらは、入力ソースの回転速度/トルクを出力負荷の必要な回転速度/トルクと一致させるように製造されています。従来、機械式歯車が広く使用されていることが知られています。ただし、これらのシステムには、接触摩擦、熱、騒音、振動などの固有の問題があります。これらの問題により、信頼性と効率が大幅に低下します。
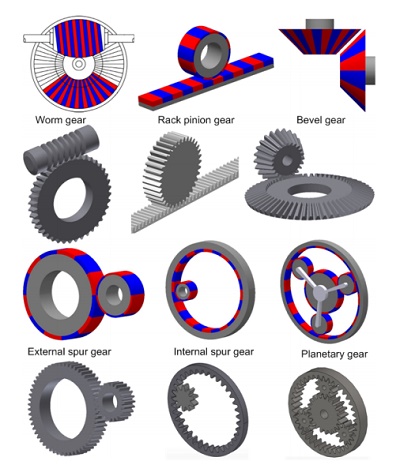
これらの問題を克服するために、新しい種類のギアが開発されています。非接触での動力伝達を実現する磁気歯車が普及しています。これらは、潤滑とメンテナンスのコストを節約し、熱の問題を最小限に抑える摩擦のないトランスミッションを提供します。磁気ギアは、過負荷トルクがかかると無害にスリップし、過負荷トルクが取り除かれると自動的かつ安全に再係合することにより、本質的に過負荷から保護します。音響ノイズと振動が少ないことに加えて、上記の利点により、高効率で安全なギアシステムを実現できます。したがって、これらの非接触電力伝送デバイスは、次のアプリケーションで見つけることができます [1]: 高いレベルの安全性を必要とする過負荷保護アプリケーション (コードレス電動工具、工場の搬送装置など)、金属粉を必要としないクリーン ルーム アプリケーション (ウェーハ搬送)ロボット、ウェーハ ステッパー、半導体ステップ アンド スキャン システム)、一定レベルの効率を必要とする電動モビリティ アプリケーション (電動自転車、スクーターなどのトランスミッションシステム)。磁気ギアのいくつかの構造とトポロジーは、その役割と形状 (同軸、平行軸、受動、能動など) に応じて研究および開発されています。以下の図 1 は、機械ギアと磁気ギアの間の対応するギア トポロジを示しています [1]。
ただし、磁気ギアには、サイズが大きい、磁場干渉、高価な永久磁石、低いトルク密度、一定の出力比などの欠点があります。したがって、業界と研究者の両方が磁気ギアを改善および強化し、これらの欠点を克服するために取り組んでいます。磁束と伝達されるトルクは、磁気ギアの設計と最適化における 2 つの重要な要素です。
有限要素法 (FEM) は、工学システムの設計と解析において高い信頼性を示してきました [1]。複雑なジオメトリのシミュレーションや、線形問題と非線形問題の両方に使用できます。さらに、有限要素解析 (FEA) を使用して、3D および 2D 近似ジオメトリの両方を解決できます。 2D FEA を使用すると、時間の節約、より多くの反復の実行などの追加の利点が得られます。 2D問題として近似します。
この記事では、EMWorks2D を使用して、2 つの同軸磁気ギア モデルの磁気結果 (磁束密度、磁場強度、トルクなど) を計算します。トルク結果は参照結果と比較されます。
同軸磁気ギアの 2D シミュレーション [2]
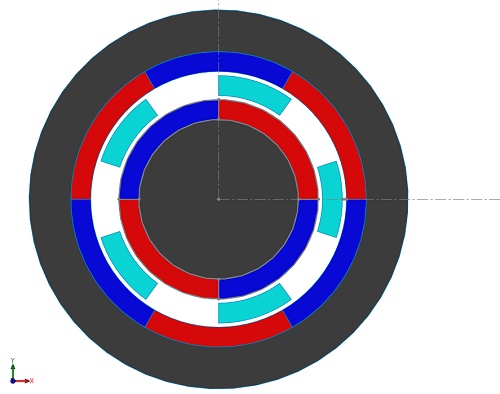
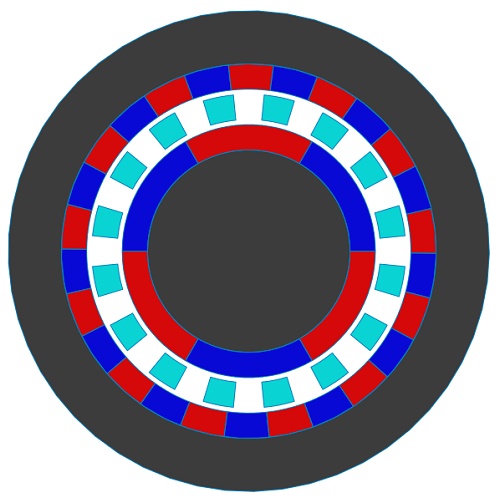
同軸磁気ギア モデルは [2] に示されています。これは、Pi= 2 極対の内側回転子、Po=3 極対の外側回転子、および Q=5 強磁性極片で構成されています。インナーローターはアウターローターよりも高速で回転します。したがって、内側ロータは高速ロータ (HS) であり、外側ロータは低速ロータ (LS) です。 LS ローターは、HS ローターよりも高いトルクを発生します。エアギャップ領域の磁束と発生トルクは、EMWorks2D を使用して評価されます。この分析では、最終効果は無視されます。鉄心の透磁率は無限大ですが、磁石の残留磁気と相対反動透磁率はそれぞれ 1.2T と .磁石は半径方向に交互に磁化されています。
モデルは SOLIDWORKS 内で構築されます。表 1 は、磁気ギア モデルの主な特性をまとめたものです。図 2 は、SOLIDWORKS で作成された 2D モデルを示しています。
| 項目 | 寸法 |
| インナーローターヨークの半径 | 40.00mm |
| インナーローターPMsの外径 | 50.00mm |
| スロットの内径 | 52.00mm |
| スロットの外径 | 62.00度 |
| スロット開口部 | 36.00度 |
| アウターローターPMsの内径 | 64.00mm |
| アウターローターヨークの内径 | 74.00mm |
| 軸長 | 100.00 |
| 極対インナーローター | 2 |
| 極対アウターローター | 3 |
| 強磁性ポールピース | 5 |
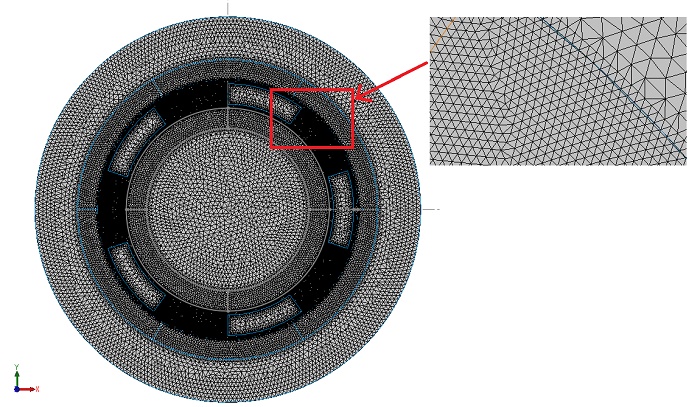
EMWorks2D には、三角形のメッシュ要素を生成する柔軟な自動メッシャーが装備されています。正確な結果を得るために、エア ギャップ領域にメッシュ リファインメントが適用されます。図 3 は、EMWorks2D によって作成されたメッシュ プロットを示しています。
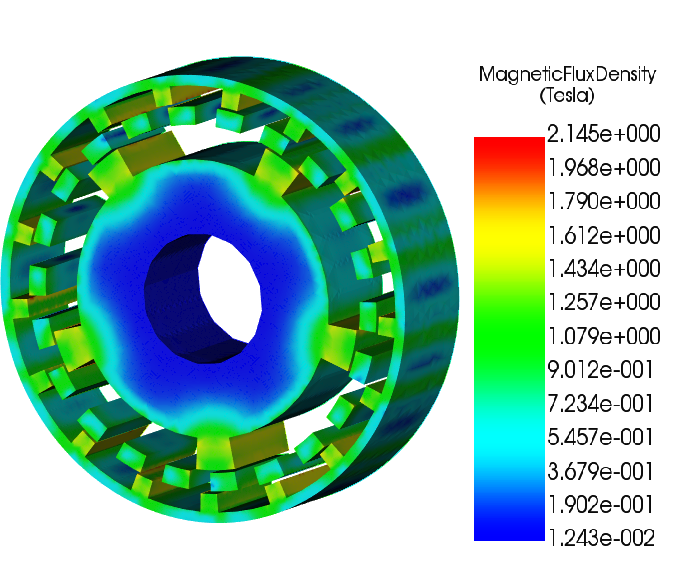
最初は、HS ローターが角度を付けて回転している間に、LS ローターと強磁性体のピースが固定されます。 0° から 90° の範囲。 EMWorks2D を使用してパラメトリック スイープ解析を実行し、内側のローター角度に対する磁束とトルクの結果を計算します。図 4a) と図 4b) はそれぞれ、モデル内の磁束密度分布を示しています。
と
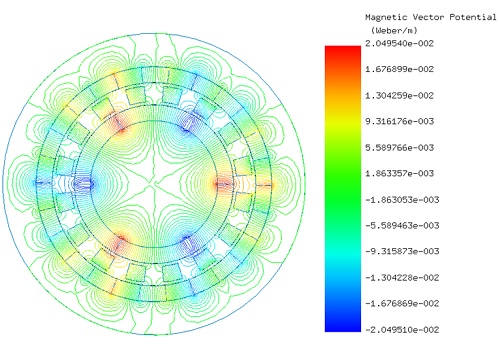
.プロットには、強磁性体に高フラックス スポットが含まれています。図 5 は、角度でのエア ギャップ領域の磁束密度を示しています。
.インナーローターとアウターローターの極の位置により、不均一な分布を示しています。磁気ベクトル ポテンシャル ラインは、図 6 にプロットされています。強磁性体の部分は、HS ローターと LS ローターの極の間の中間の空気領域で磁束を伝導するのに役立ちます。実際には、図 6 に示すように、すべての磁束密度が磁気ギア デバイス内を循環しています。
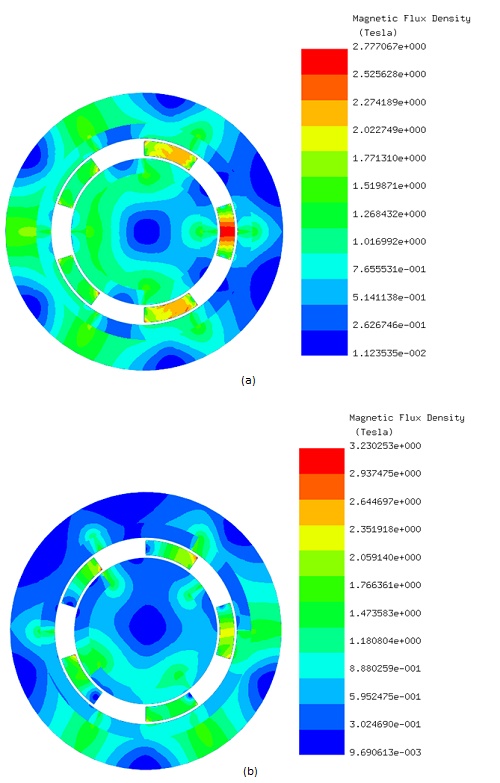
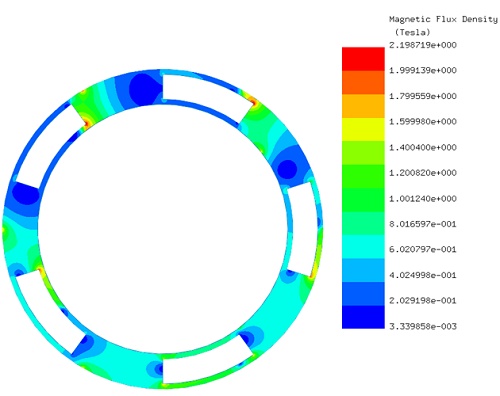
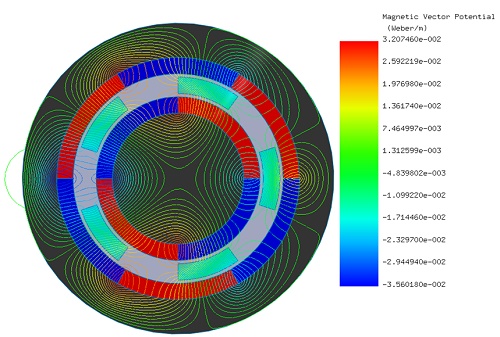
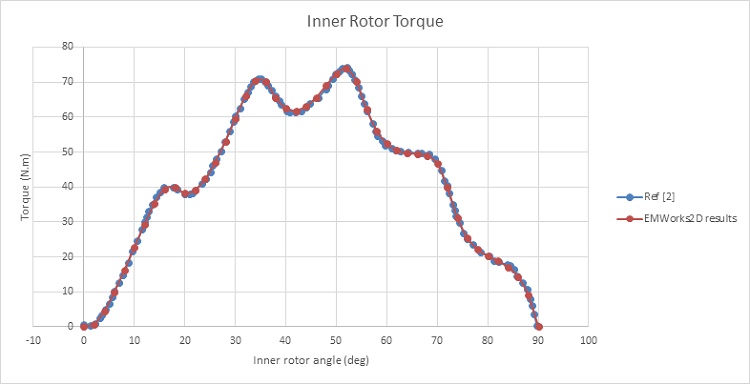
図 7 は、LS ロータと強磁性片が静止した状態で、HS ロータに発生する磁気トルクを示しています。でのトルクはほぼゼロです。 で、70 Nm の最初のピークに達するまで、角度とともに増加し始めます。
.トルク曲線は 74 Nm の 2 番目のピークに達します。
、 で再び null になるまでドロップダウンします
.
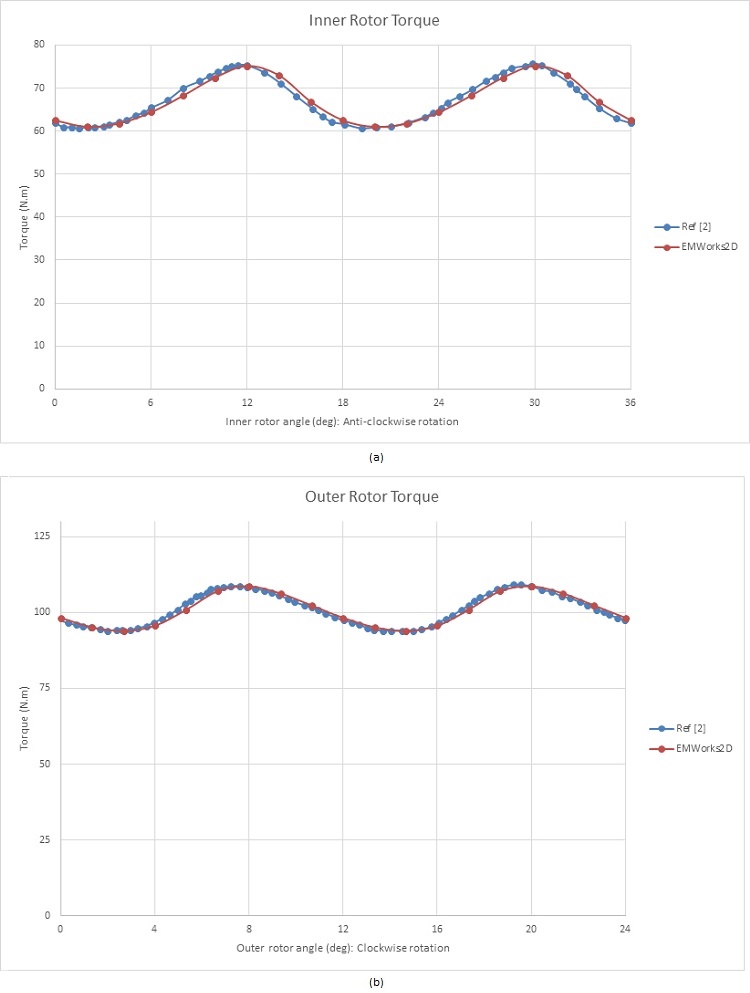
ここで、内側と外側のローターが両方とも逆方向に回転している場合 (強磁性片が固定されている場合) に生成されるトルクを評価します。
アウターローター角度は、次の式を使用して記述されます。
[2]。 HS ローターの開始位置は
これは、LS ローターでは約 98 Nm であるのに対し、約 62 Nm のトルク値に相当します。図 8a) と 8b) は、それぞれ内側と外側のローターに加えられたトルクを表しています。 HS ローターで生成される平均トルクは約 67 Nm ですが、LS ローターでは約 101 Nm であり、ギア比は約 3:2 になります。したがって、インナーローターを回転させると、この磁気ギアシステムによりトルクが1.5倍に増幅されます。
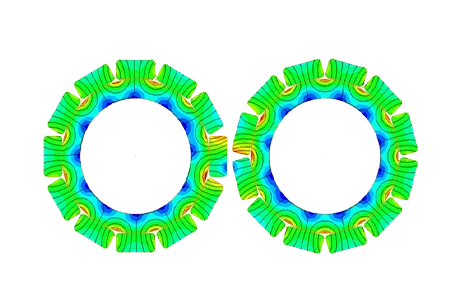
上記のトルク曲線は、高いリプルが特徴です。この問題を克服するために、より高い極対を持つ新しいモデルが開発され、研究されています。新しい磁気ギア構造 [2] を図 9 に示します。Pi=3 の内側ローターの極対が含まれ、外側のローターには Po=13 の極対があります。これにより、ギア比は 4.33 になります。強磁性体の個数はQ=16です。
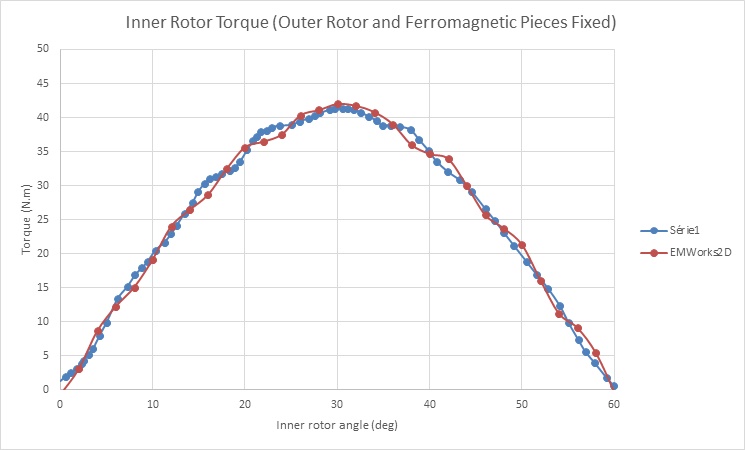
磁束線は図 10 にプロットされています。中間の強磁性片は、エア ギャップ領域で磁束を伝導します。前のセクションと同様に、最初のトルク曲線は、HS ローターが回転し、LS ローターと強磁性部品が固定されているときに計算されます ( 0° から 60° まで変化します)。 HS ローターの計算されたトルクを図 11 に示します。
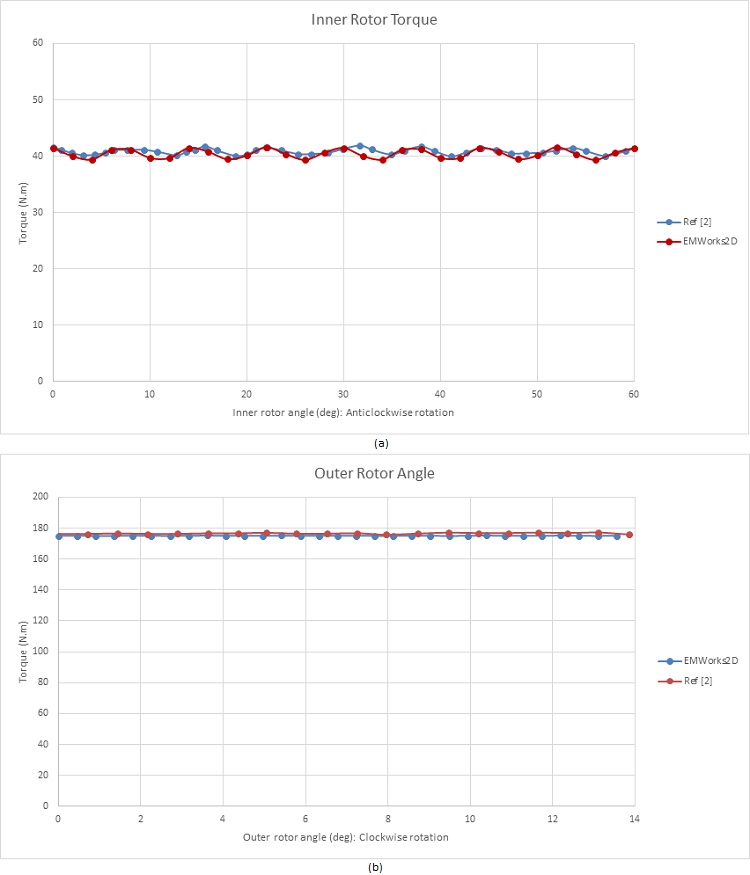
.図 12a) と 12b) は、逆方向に回転している間に内側ローターと外側ローターでそれぞれ発生するトルク曲線を示しています。 HS ローターは 41 Nm のトルクを生成し、LS ローターで生成されたトルクは約 175 Nm です。したがって、両方のトルクは計算されたギア比を検証し、リップルが低いという特徴があります。図 12b) からわかるように、リップルは実質的に除去されています。
結論
磁気ギアシステムは、いくつかの利点があるため、動力伝達において高い能力を示してきました。したがって、多くの用途や分野で従来の機械式歯車に取って代わりました。しかし、彼らはまだいくつかの問題や制限に苦しんでいます。より高い効率と安定性を提供する新しい磁気ギアを研究および開発するために、コンピュータシミュレーションが使用されます。数値シミュレーションは、試作品を減らすことで時間と費用を節約し、実際の条件で正確なデータを提供することで、これらの磁気ギアの開発プロセスを加速するのに役立ちます。この記事では、EMWorks2D を使用して磁気の結果 (磁束とトルク) を予測しました。
参考文献
[1]:P.M. Tlali, R-J. Wang, S. Gerber. Magnetic Gear Technologies: A Review. IEEE: 2014 International Conference on Electrical Machines (ICEM)[2]:Thierry Lubin, Smail Mezani, Abderrezak Rezzoug. Analytical Computation of the Magnetic Field Distribution in a Magnetic Gear.
Groupe de Recherche en Electrotechnique et Electronique de Nancy, University Henri Poincaré, Nancy, FRANCE