自動車の電動化に役立つコンピュータ CAD 設計とシミュレーション
バッテリーと電気モーターは、ゼロガス排出車の主要な鍵です。したがって、エンジニアや研究者あらゆるユーザーの要件を満たすことができる、より信頼性の高い製品の設計と開発に取り組んでいます。このアプリケーション ノートでは、プリウス 2004 の電気モーターを EMWorks2D を使用して解析しました。これは、SOLIDWORKS に統合された、EMWorks が提供する 2D 電磁ツールです。
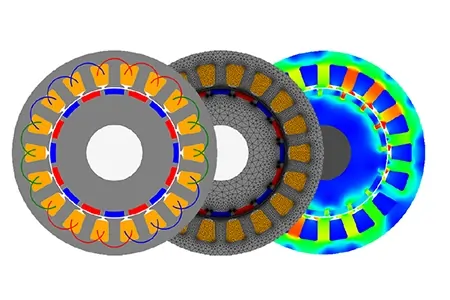
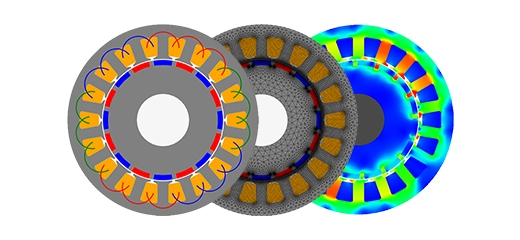
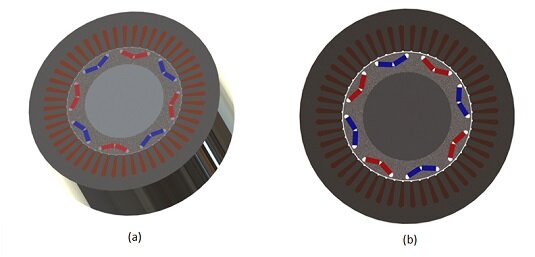
下の図は、SOLIDWORKS で作成された 2004 年のプリウス電気モーターの 2D および 3D CAD モデルを示しています。トヨタ プリウスは、世界で最も早く量産されたハイブリッド車の 1 つです。内部永久磁石同期モーター (IPMSM) が付属しています。プリウス 2004 モーターの仕様データは、表 1 のとおりです。
| 仕様 | 値 |
| 定格電流 | 230A RMS |
| 定格速度 | 1200RPM |
| 定格トルク | 400Nm |
| 定格出力 | 50kW |
| ラミネート材 | M-19 |
プリウス 2004 の内装 PM 同期モーターには、48 スロットと 8 極がローター積層コア内に埋め込まれています。ローターとステーターの両方のコアは、積層鋼 M-19 (スタック係数は 0.94) でできています。この検討対象のモーターには、スロットあたり 9 巻きが直列に接続された単層の 3 相分布巻線があります。埋設同期機は、表面実装機に比べて高いトルク値を提供します。トルクは、永久磁石トルクとリラクタンス トルクの 2 つの成分で構成されます。 V 字型のマグネット ハウジングは、直交軸のリアクタンスを大きくするように設計されており、これにより、PM トルクに同期したより高いリラクタンス トルクが得られます。
次のセクションでは、EMWorks 製品を使用して実行されるさまざまな解析を示します。
無負荷解析
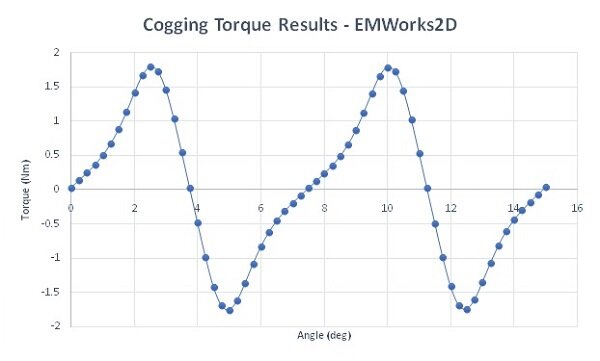
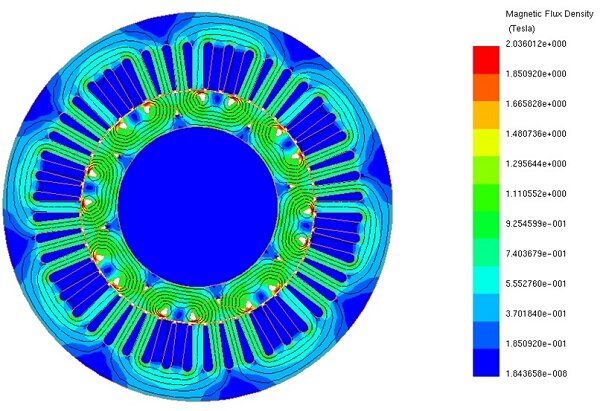
回転子の初期位置は、次のように選択されます。回転子の北極軸 (d 軸) は、相 AA' 軸と一致します。コギングトルクとは、強磁性コアと永久磁石の相互作用によって発生するトルクです。プリウス IPMSM のコギング トルクの結果を図 2 に示します。無負荷トルクは、周期 7.5 度 (360 度/48 スロット) の正弦波形状をしています。 2.5 度で 1.79Nm のピークに達します。図 3 に巻線励磁0時の位置 0 deg での磁束密度分布を示します。
拘束解析
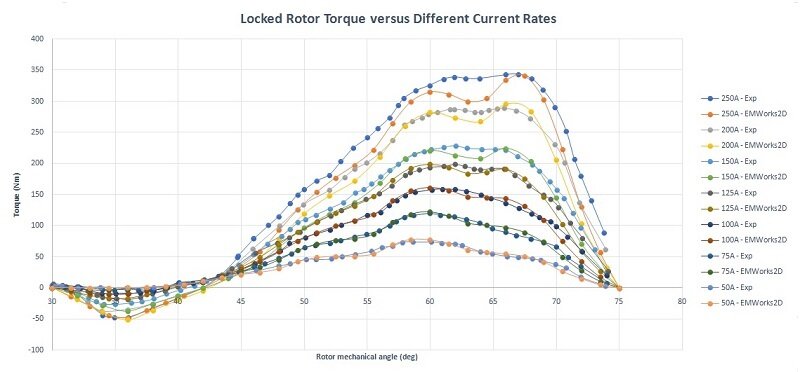
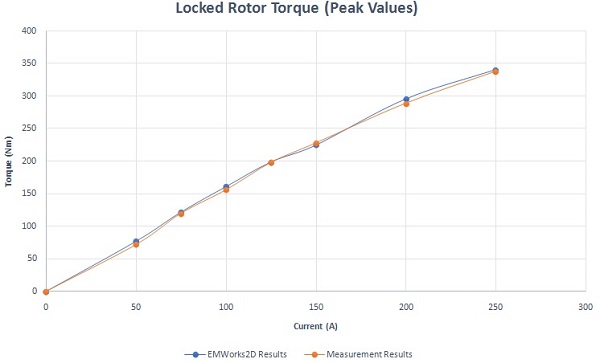
[1] [2] [3]で発表されたように研究によって実現された測定結果は、さまざまな電流値での拘束された回転子のトルクの結果を示しています。図 4 は、EMWorks2D と測定データの間のさまざまな電流値でのトルク結果の比較を示しています。 60-68 deg (機械角) 付近で最大トルクに達することがわかります。電流に対する最大トルク値を図 5 にプロットします。
負荷解析
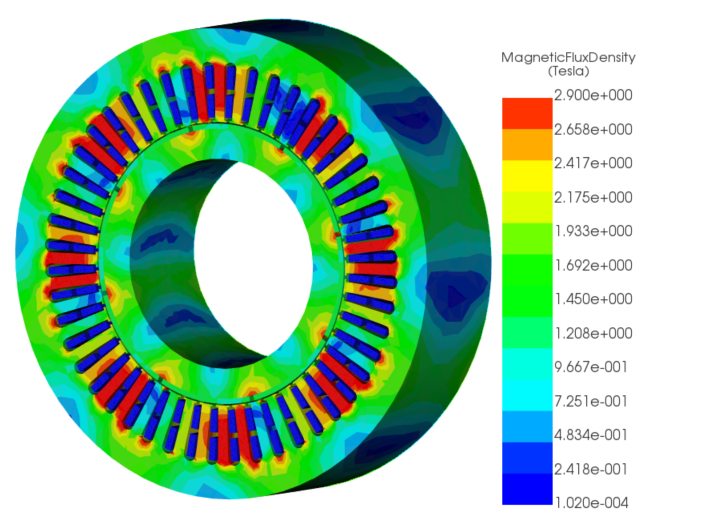
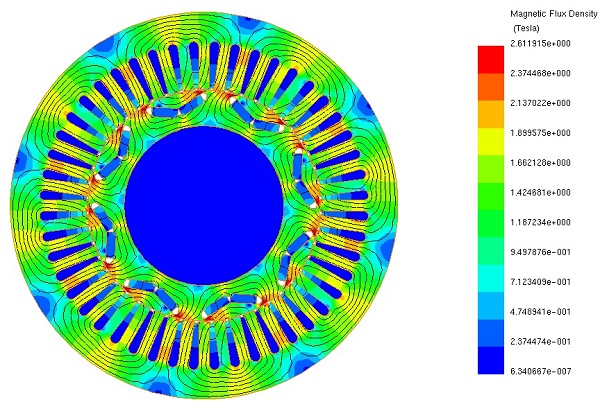
PM 同期機には、正弦波励磁 (230A RMS、80Hz) が供給されます。ローター速度は 1200 RPM です。図6に0度における磁束密度を示します。高磁場スポットは、ローター磁石ブリッジの近くにあります。磁場のアニメーションを図 7 に示します。
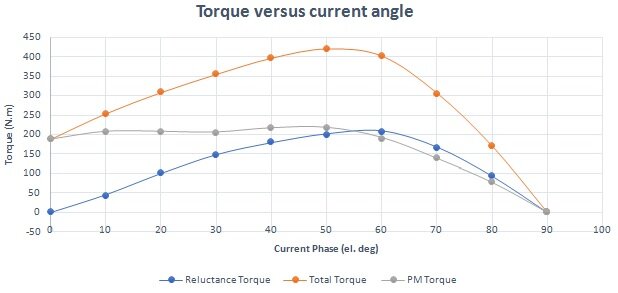
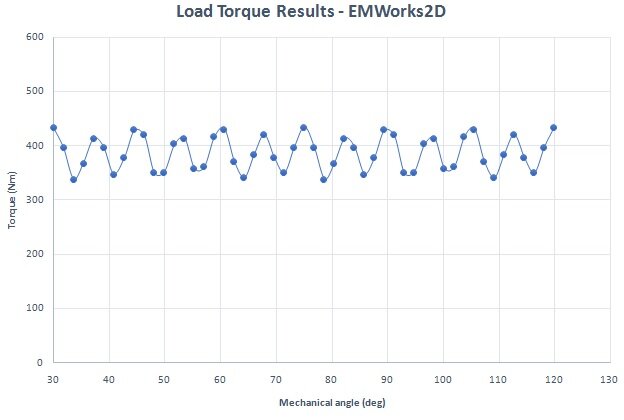
前述のように、埋め込み型永久磁石同期機では、総トルクは永久磁石トルクとリラクタンス トルクの合計になります。合計を最大にするには、特定の現在の角度を決定する必要があります。図 8 は、さまざまなトルク タイプと現在の角度を示しています。現在の角度が 50 el 付近で合計トルクが最大になります。度負荷トルクの結果とローター角度を図 9 に示します。434 Nm から 339 Nm の間で振動しています。したがって、トルクリップルは約 50 Nm ですが、平均トルクは 386.5 Nm に達します。
まとめ
過去数年間で、自律的で効率的な電気自動車の開発が重要な進歩を遂げました。コンピュータ CAD 設計およびシミュレーションソフトウェアの使用は、電気モーターなどの電気自動車の主要コンポーネントを改善する信頼性を実証しています。 EMWorks は、SOLIDWORKS 内での電気モーターのモデリングとシミュレーションを支援する斬新で使いやすい製品を提供します。