ステッピングモーターについて
定義:ステッピングモーターまたはステップモーターまたはステッピングモーターは、1回転を多数の等しいステップに分割するブラシレスDC電気モーターです。モーターがトルクと速度に関して用途に合わせて慎重にサイズ調整されている限り、フィードバックセンサー(開ループコントローラー)を使用せずに、これらのステップの1つでモーターの位置を移動および保持するように命令できます。
ステッピングモーターは何に適していますか?
- ポジショニング –ステッパーは正確な反復可能なステップで移動するため、3Dプリンター、CNC、カメラプラットフォーム、X、Yプロッターなどの正確なポジショニングが必要なアプリケーションに優れています。一部のディスクドライブでは、ステッピングモーターを使用して読み取り/書き込みヘッドを配置します。
- 速度制御 –動きの正確な増分により、プロセス自動化およびロボット工学のための回転速度の優れた制御も可能になります。
- 低速トルク -通常のDCモーターには、低速ではあまりトルクがありません。ステッピングモーターは低速で最大トルクを持っているため、低速で高精度を必要とするアプリケーションに適しています。
彼らの制限は何ですか?
- 低効率 – DCモーターとは異なり、ステッピングモーターの消費電流は負荷に依存しません。彼らは仕事をしていないときに最新のものを使います。このため、彼らは熱くなりがちです。
- 制限された高速トルク -一般に、ステッピングモーターは低速よりも高速でのトルクが小さくなります。一部のステッパーは高速パフォーマンスを向上させるために最適化されていますが、そのパフォーマンスを実現するには適切なドライバーとペアにする必要があります。
- フィードバックなし –サーボモーターとは異なり、ほとんどのステッパーには位置のフィードバックがありません。 「オープンループ」を実行すると、非常に高い精度を実現できますが。通常、リミットスイッチまたは「ホーム」検出器は、安全のため、および/または基準位置を確立するために必要です。
調査
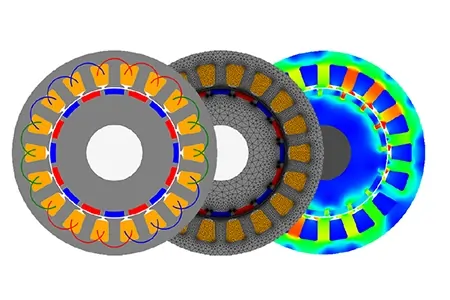
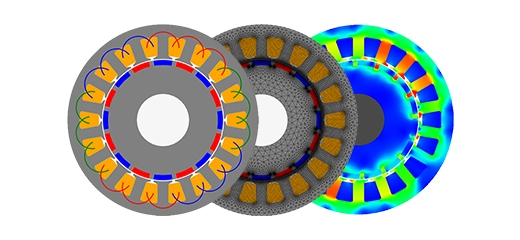
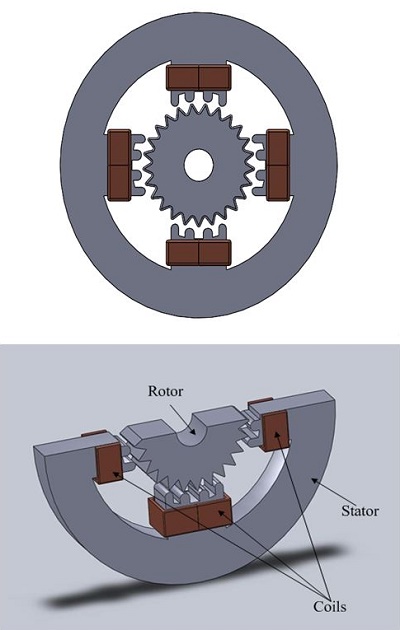
コギングされたローターを備えたステッピングモーター(図2)は、EMS過渡磁気解析タイプを使用して解析されます。
ステータは4つのスポークで構成され、各スポークは銅コイルで囲まれています。各コイルに印加される電流は、時間遅延のあるパルス信号です。コイルによってローターに加えられる電磁力とトルクが計算されます。すべての時間ステップでローターとステーターを通る磁束密度経路も取得されます。さらに、電流密度はEMSによって与えられます。
EMSのTransient Magneticモジュールは、時間とともに変化する磁場を計算して視覚化するために使用されます。これらのフィールドは通常、電流または電圧のサージによって引き起こされます。このタイプの分析は、線形または非線形にすることができます。また、渦電流、電力損失、磁力にも対応しています。 EMSでトランジェントマグネットスタディを作成した後、常に4つの重要な手順を実行します。1-すべてのソリッドボディに適切な材料を適用する、2-必要な境界条件を適用する、またはEMSのいわゆる荷重/拘束、3-メッシュを作成するモデル全体と4-ソルバーを実行します。
材料
EMSの過渡磁気解析では、材料全体の特性が必要です(表1)。
| コンポーネント/ボディ | 材料 | 比透磁率 | 伝導率(S/m) |
| ローター | 軟鋼 | 2000年 | 1.1e + 006 |
| 外気 | 空気 | 1 | 0 |
| 内気 | 空気 | 1 | 0 |
| コイル | 銅 | 0.99991 | 57e + 006 |
| 固定子 | 軟鋼 | 2000年 | 1.1e + 006 |
電磁入力
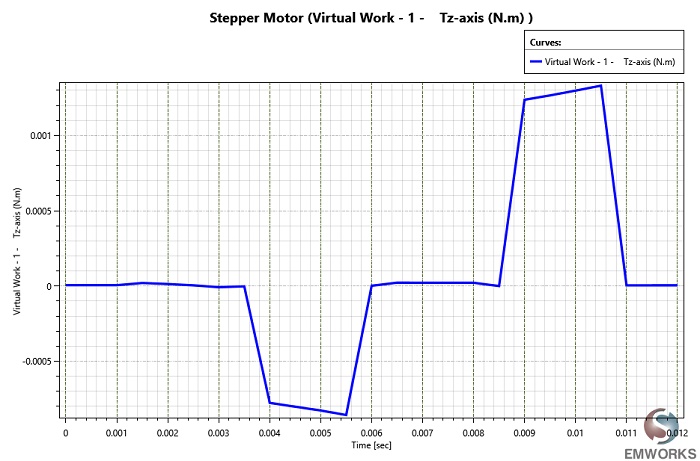
この調査では、4つのコイル(表3)と仮想作業を計算する必要があるローター(表3)が適用されます。
表2-コイル情報
| 名前 | ターン数 |
| 巻線コイル(1-4) | 10 |
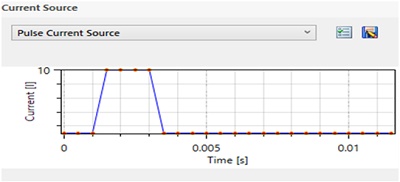
Transient Magneticでは、下図に示すように、コイルの励起波形(電圧または電流源)を指定する必要があります。
| 名前 | トルクセンター | コンポーネント/ボディ |
| バーチャルワーク | 原点で | ローターと永久磁石 |
メッシング
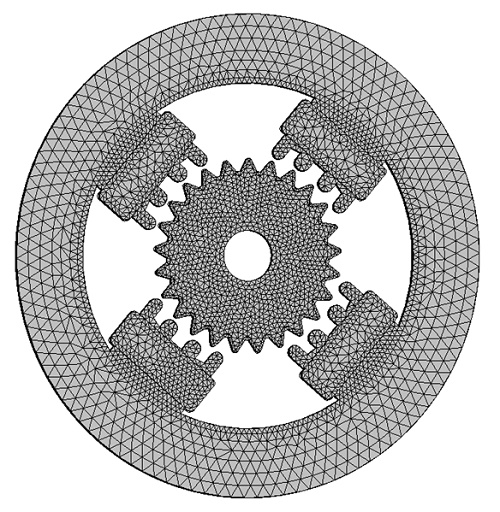
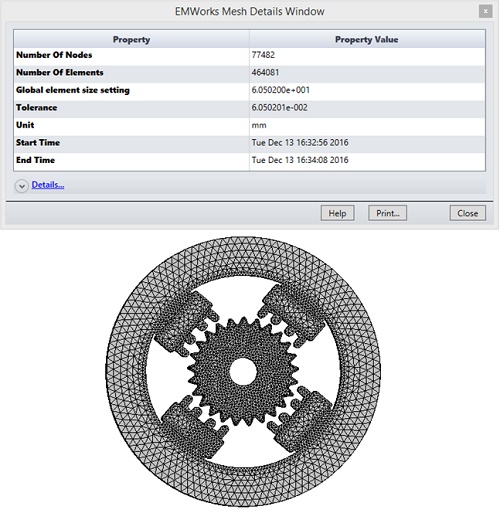
メッシュ化は、設計分析において非常に重要なステップです。 EMSは、その体積、表面積、およびその他の幾何学的な詳細を考慮して、モデルのグローバル要素サイズを推定します。生成されるメッシュのサイズ(ノードと要素の数)は、モデルのジオメトリと寸法、要素サイズ、メッシュ許容値、およびメッシュコントロールに依存します。おおよその結果で十分な設計解析の初期段階では、より高速なソリューションのために、より大きな要素サイズを指定できます。より正確なソリューションを得るには、より小さい要素サイズが必要になる場合があります。
メッシュ品質は、メッシュコントロール(表4)を使用して調整できます。メッシュコントロールは、ソリッドボディと面に適用できます。以下(図4)は、メッシュコントロールを使用した後のメッシュモデルです。
表4-メッシュコントロール
| 名前 | 網目サイズ | コンポーネント/ボディ |
| メッシュコントロール1 | 4.00 mm | コイル/ローター/ステーター |
| メッシュコントロール2 | 1.500ミリメートル | 内気 |
結果
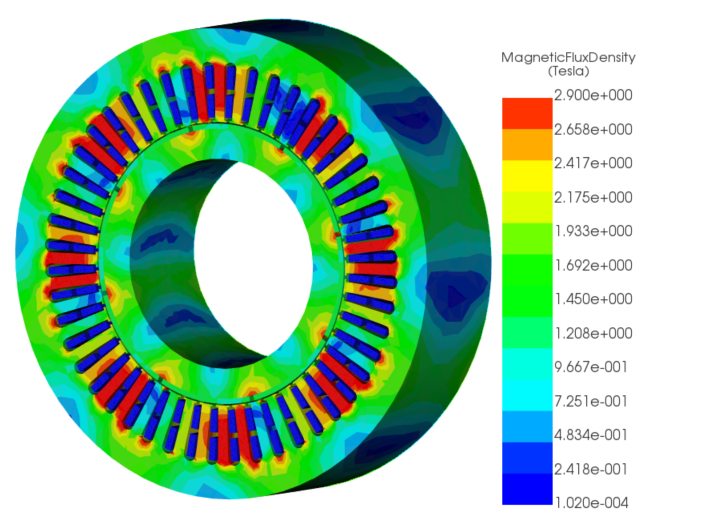
この例のシミュレーションを実行すると、多くの結果を取得できます。静磁モジュールは、磁束密度(図6)、印加電流密度(図7)、力密度、およびモデルの計算されたパラメーター、力、トルクを含む結果表(図8)の結果を生成します。
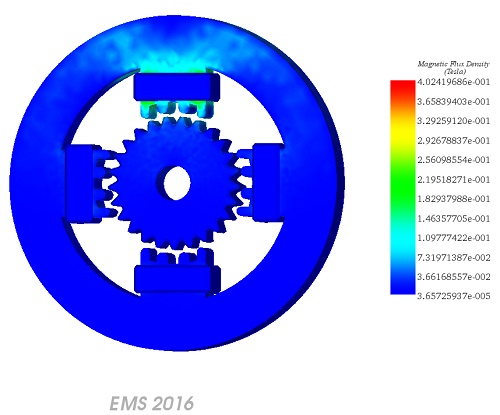
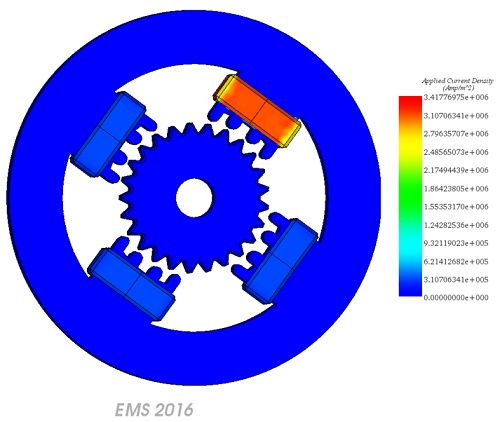
図 7-0.004秒での印加電流密度、各T/4の間に1つのコイルのみが励起される
結論
複数のスタディを作成することにより、ユーザーは材料、ターン数、各ターンの電流、各パーツのジオメトリを変更できます。EMSを使用すると、同じアセンブリファイルを保持し、各スタディを設計テーブルの位置に関連付けることができます。これらの機能はすべて設計者にとって非常に役立ち、モーターの性能を最適化するために変更する必要があるステッピングモーターのパラメーターを決定するために使用できます。したがって、EMSはSolidWorksとInventorに完全に統合されていることに加えて、EMSも正確で使いやすいです。