誘導近接センサー
誘導センサーは、PCB コイルのインダクタンスの変化を測定することにより、可動ターゲットの位置を正確に検出する役割を果たします。このコイルを適切な回路に接続することにより、測定された近接性とインダクタンスを相関させることができます。 EMS は、ターゲットのさまざまな位置で PCB コイルのインダクタンスを計算するために使用されます。これは、回路設計者がこのインダクタンスの変化を正確に測定できる回路を作成するのに役立ちます。
誘導型近接センサーの SolidWorks モデル
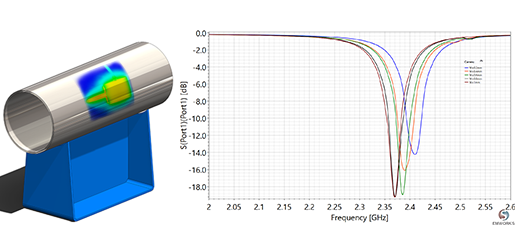
誘導センサーは、一般的に位置検出に使用されます。それらは、高周波AC電流を使用して励起されるコイルで構成されています。誘導センサーの基本原理は、ファラデーの誘導の法則に基づいています。電流の振幅は非常に小さく、mA のオーダーです。図 1 に示すように、ターゲットが近くにない場合、コイルのインダクタンスはよく知られており、EMS で計算できます。ターゲットの場合、図 2 に示すように、コイルの真上でコイルのインダクタンスが変化し、この新しいインダクタンス値はセンサーがターゲットを検出するのに役立ちます。このタイプのセンサーは、導体であるターゲットに対してのみ機能します。
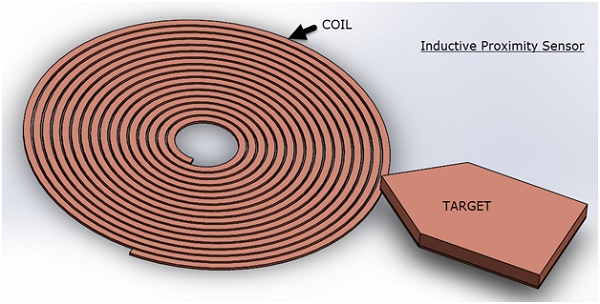
図 1 -ターゲットがすぐ近くにない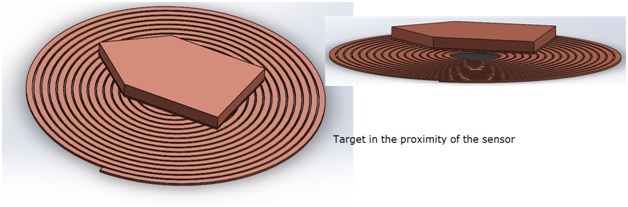
図 2 -センサーの真上にあるターゲット
誘導型近接センサーの EM シミュレーション
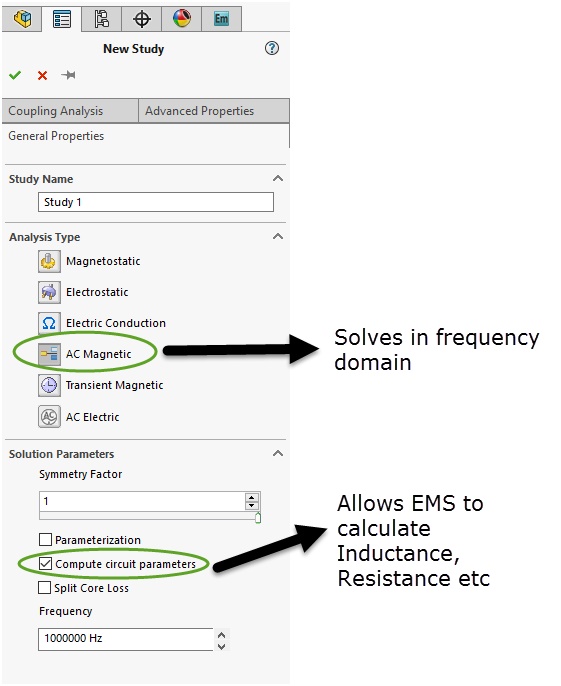
EMS では、これらのタイプのセンサーは AC 磁気シミュレーションを使用して研究されます。 AC 磁気シミュレーションでは、EMS は周波数領域で問題を解決し、コイルのインダクタンス、コイルの抵抗、磁束密度、磁場強度、および渦電流密度を出力として与えます。解は周波数領域で解かれるため、すべての場の量は位相角の関数として取得できます。
このシミュレーション (図 3) では、AC 磁気スタディの周波数は 1 MHz に設定されました。 EMS は、数百メガヘルツの周波数まで解決できます。
コイル
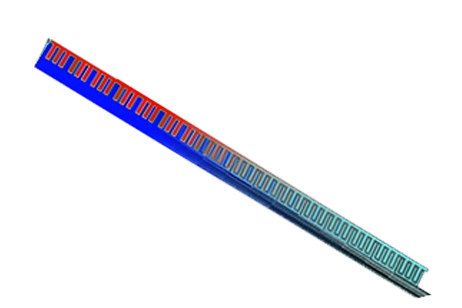
コイルはソリッド コイルとしてモデル化されます。コイルの電流は 1 mA で、電流の方向を図 4 に示します。EMS では、コイルをソリッド コイルと撚り線コイルの両方としてモデル化できます。ソリッドコイルは渦電流をサポートしますが、より線コイルは渦電流を想定していません。このシミュレーションでは、コイルの渦電流は無視されます。しかし、銅製の可動ターゲット材料については、渦効果が考慮されます。
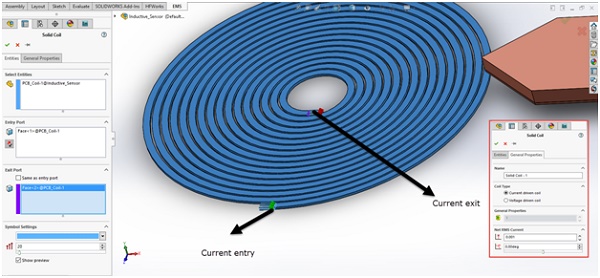
図 4 -固体コイルの電流方向
材料
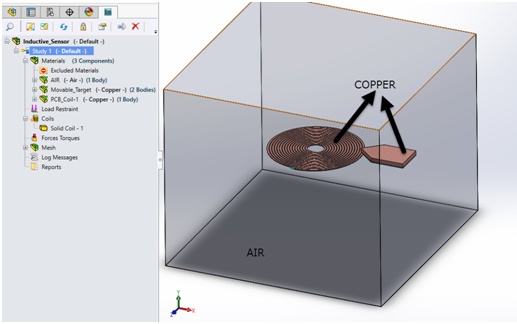
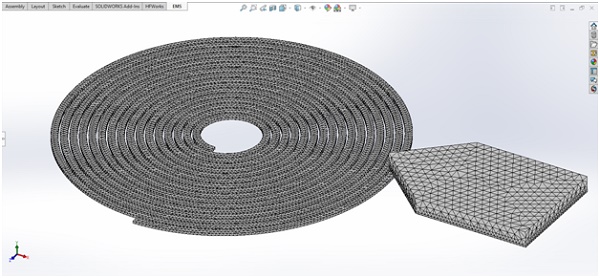
このシミュレーションには、3 つのコンポーネントがあります。コイルとターゲットは銅でできており、空気領域は名前が示すように空気です。図 5 は、このシミュレーション用にモデル化されたさまざまな部品を示しています。空気領域は、EMS を使用して実行されるすべての EM シミュレーションの重要な部分です。コイルとターゲットの周囲の空気空間の磁場量を取得するのに役立ちます。 EMS には、電気工学で一般的に使用される何百もの材料を含む、完全にカスタマイズ可能な材料ライブラリが付属しています。
メッシュ
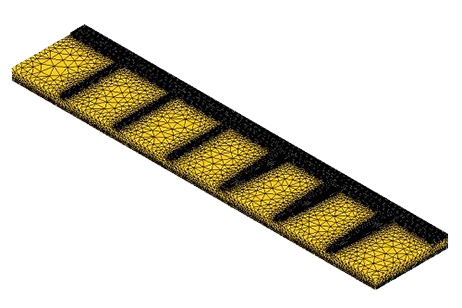
EMS には、CAD システムで作成された正確なジオメトリを考慮した完全自動メッシュ ジェネレータが付属しています。これにより、CAD ジオメトリを何らかの方法で変更または修正する必要がなくなります。ターゲットの表皮深さを捉えるために、ターゲットにメッシュ コントロールを適用します。メッシュ コントロールを使用すると、ユーザーはモデル内の領域を選択的にターゲットにし、メッシュ サイズを指定できます。図 6 は、EMS によって生成されたメッシュを示しています。
インダクタンス変化計算
結果セクションは 3 つの部分に分かれています –
- コイルのインダクタンス計算
- コイルの抵抗計算
- 磁場プロット (磁束密度、磁場強度、ターゲット内の渦電流など)
インダクタンス
コイルのインダクタンスは、エンジニアがこの値を使用してモーションを検出できる回路を設計するために役立ちます。図 7 に示すように、下の表は、ターゲットがコイルに近づいているが近くにない場合と、ターゲットがコイルの真上にある場合の 2 つの位置でのコイルのインダクタンスを示しています。ターゲットがコイルの近くにある場合、インダクタンスは 1.27 マイクロ ヘンリーから 1.07 マイクロ ヘンリーに減少します。これにより、コイルのインダクタンスが 15.7% 減少します。これらの値は、エンジニアがこの違いを捉えるのに十分な感度を持つ回路を設計するのに役立ちます。
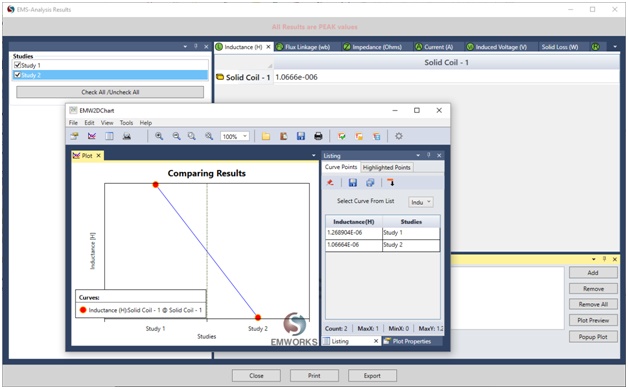
図 7 - 2 つの位置のインダクタンスの比較
抵抗
コイルの抵抗は固有の特性であり、ターゲットの位置によって変化しません。 EMS は、正確なジオメトリに基づいてコイル抵抗を計算します。コイルの抵抗は、図 8 に示すように 0.35 オームと計算されます。この抵抗はコイルの DC 抵抗であることに注意してください。
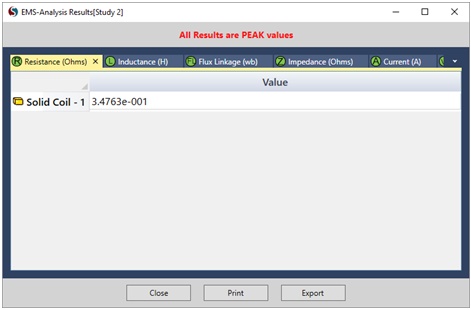
図 8 - EMS はコイルの DC 抵抗を計算します
誘導型近接センサーによって生成される 3D フィールド
図 9 と 10 は、位置 2 (ターゲットが近接している場合) の磁場密度と磁場強度のプロットを示しています。磁束密度ベクトル プロットでは、ターゲットを通過するベクトルのサイズが小さくなっていることに注意してください。これは、ターゲットに誘導された渦電流が原因です。ターゲット上の渦電流は、コイルによって生成された磁場に対抗します。 EMS は、3D プロット、ベクトル プロット、セクション プロットを作成できます。これらのプロットの一部は、フィールドを詳しく視覚化し、さまざまな状況で何が起こるかを理解するのに役立ちます。
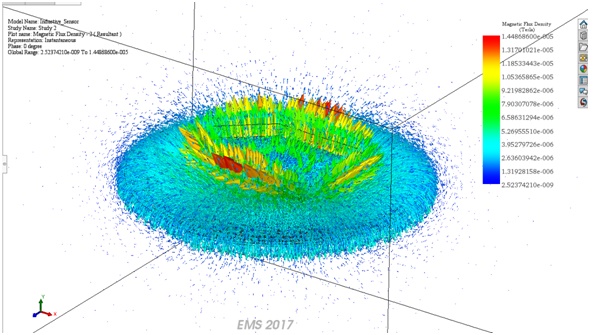
図 9-磁束密度のベクトル プロット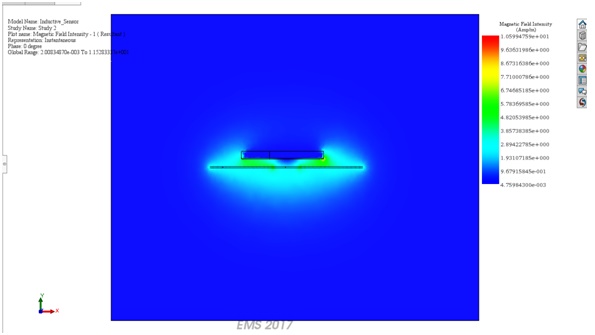
図 10-磁場強度のセクション プロット
図 11 は、ターゲットがセンサー (またはコイル) の近くにあるときのターゲット内の渦電流の分布を示しています。電流のベクトルが、コイルによって生成される磁束に対抗する磁束を生成する方法に注目してください。
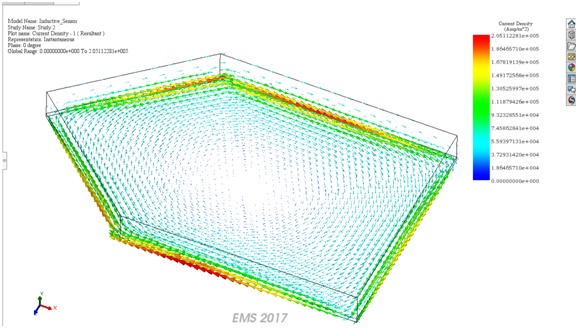
図 11 -ターゲット内の渦電流
結論
この例では、エンジニアがより優れた誘導センサーを設計するのに EMS がどのように役立つかを説明します。彼らが探している主なパラメータはインダクタンスの変化であり、この変化を捉えることができる敏感な回路を設計するのに役立ちます。フィールド プロットは、特にフィールドの動作に関して設計を詳細に調査できる豊富な情報を提供します。