What is a Spherical Motor?
Electric motors typically move in one degree of freedom, e.g., around one axis or along one direction. On the other hand, a spherical motor is a multi-axes electric machine capable of moving a part or a structure in more than one direction using only one motor. This type of motors has witnessed a significant increase in demand due to the emergence of new applications that require large tilt angles, multi-degrees of freedom (MDOF) motion, and more uniform fluxes; such applications include automotive powertrains, biomedical instrumentations, and oil and gas robots. Unfortunately, designing spherical motors is an uncharted territory for most motor and actuator companies. Such an undertaking necessitates not only an experienced engineer with a deep understanding of motor design, but also a state-of-art motor simulation software capable of handling MDOF motion. Most commercial electromagnetic and motor simulation software packages can handle only one degree of freedom, except EMS. Thanks to the coupling to SolidWorks Motion, EMS is capable of handling MDOF motion.
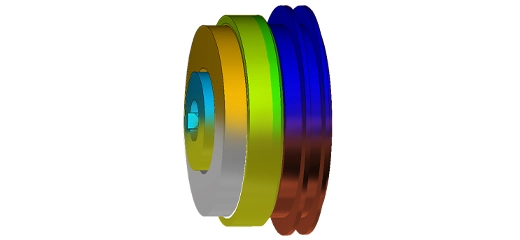
SolidWorks Model of 2 DOF Spherical Motor
A Breakthrough in Modeling Spherical Motors
SolidWorks Motion is a powerful kinematics and dynamics software tool capable of handling six degrees of freedom independently and simultaneously. EMS, seamlessly, piggybacks on SolidWorks Motion; together they offer a breakthrough in modeling spherical motors. To test this powerful feature, we used EMS to model a 2 DOF spherical motor. As shown below, it has a rotor made of a cylindrical core with 4-pole radially oriented permanent magnets and 3-block stator having 18 coils; each coil has 90 turns and excited by 1A. The rotor can rotate around x and y axes independently or simultaneously.
The 2 DOF Spherical Motor Modeled in EMS/SolidWorks
EMS Results
The rotation about X and Y axes are controlled via the excitation of the appropriate coils. For instance, to achieve a rotation around the X-axis, the coils marked in yellow in the figure below must be excited:
Excited Coils for X-Axis Motion Marked in Yellow
The following results are thus obtained:
Magnetic Flux Density Animation Around X-Axis Alone
Torque Around X-Axis Versus Rotation Angle
Similarly, the Y-axis rotation follows suit:
Excited Coils for Y-Axis Motion Marked in Yellow
Magnetic Flux Density Animation Around Y-Axis Alone
Torque Around Y-Axis Versus Rotation Angle
Obviously, to achieve a simultaneous rotation along X and Y-axes, both coil sets must be excited simultaneously.
Magnetic Flux Density Animation Around X and Y-Axes Simultaneously
Torques Around X and Y-Axes Versus Time when Both X and Y Coils are Excited Simultaneously
Conclusion
Spherical motors, facilitating multidirectional movement, are increasingly vital in industries demanding complex motion control. Designing these motors necessitates specialized expertise and advanced simulation tools. EMS, capable of handling multidimensional motion, offers a breakthrough in modeling such motors, enabling precise analysis and optimization. With EMS, engineers can simulate spherical motor designs for various applications like automotive powertrains and biomedical instruments, driving innovation in motion control technology.